请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 主题中讨论的其他器件:HALCOGEN
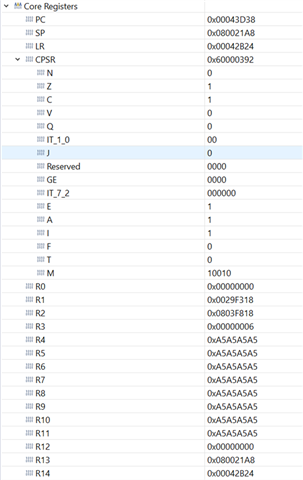
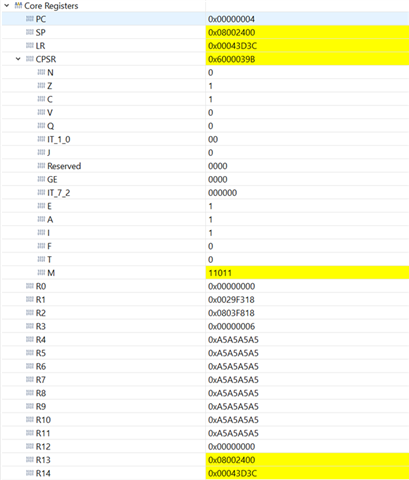
我目前正在处理一个项目、在此项目中、我们将使用编译标记"-code_state=16"来编译项目以获取经验法则指令。 我正在运行中、出现一个问题、即我正在输入 IRQ、进入此 IRQ 后、CPSR 寄存器中的 T 位将从1切换到0 (Thumb 切换到 ARM)、但此 IRQ 中的指令仍然是 Thumb 指令。 在 IRQ 内执行其中一个 thumb 指令(MOV 指令)时、我会得到一个未定义指令硬故障。 我不确定这是因为在 ARM 模式下尝试执行一个 thumb 指令、还是因为其他原因。 在执行导致硬故障的指令之前和执行导致硬故障的指令之后、我附加了一个内核寄存器状态的图像。 我还附上了 C 代码反汇编的图片、以确切显示导致问题的指令。 如果有任何关于如何解决这一问题的指示,将不胜感激。
谢谢、
Thomas
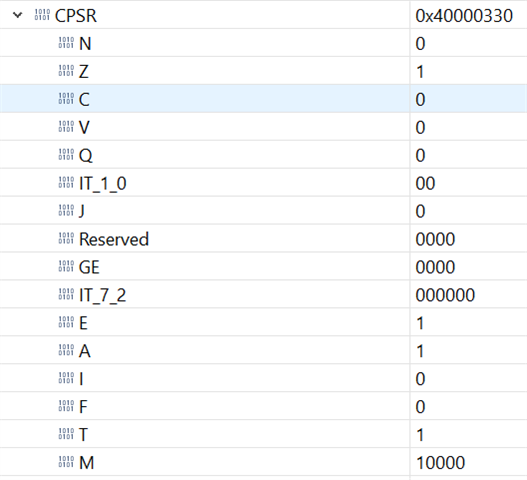
以前:
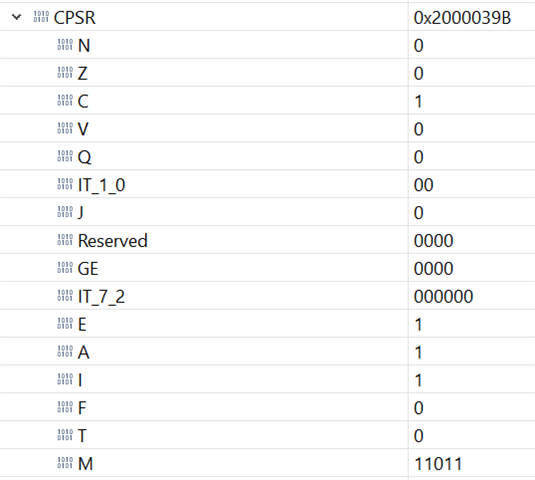
之后:
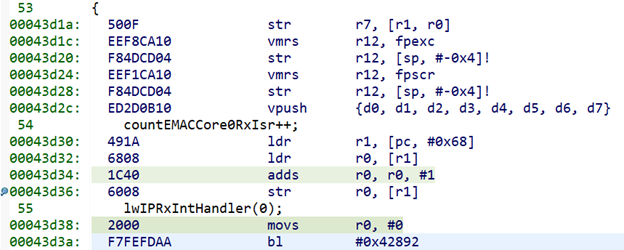
拆卸: