Other Parts Discussed in Thread: TM4C123BH6PM
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123BH6PM 主题中讨论的其他器件:DK-TM4C123G、
大家好、
客户提供了使用 Tiva DK-TM4C123G 重新生产的项目。对于以下 E2E 线程、我连接了它。
请您对此进行调查吗?
原始线程已锁定。 我创建一个新的。
TM4C123BH6PM:丢失 CAN 按摩物体
e2e.ti.com/.../TestDK_5F00_Bord.zip
< TI.png>
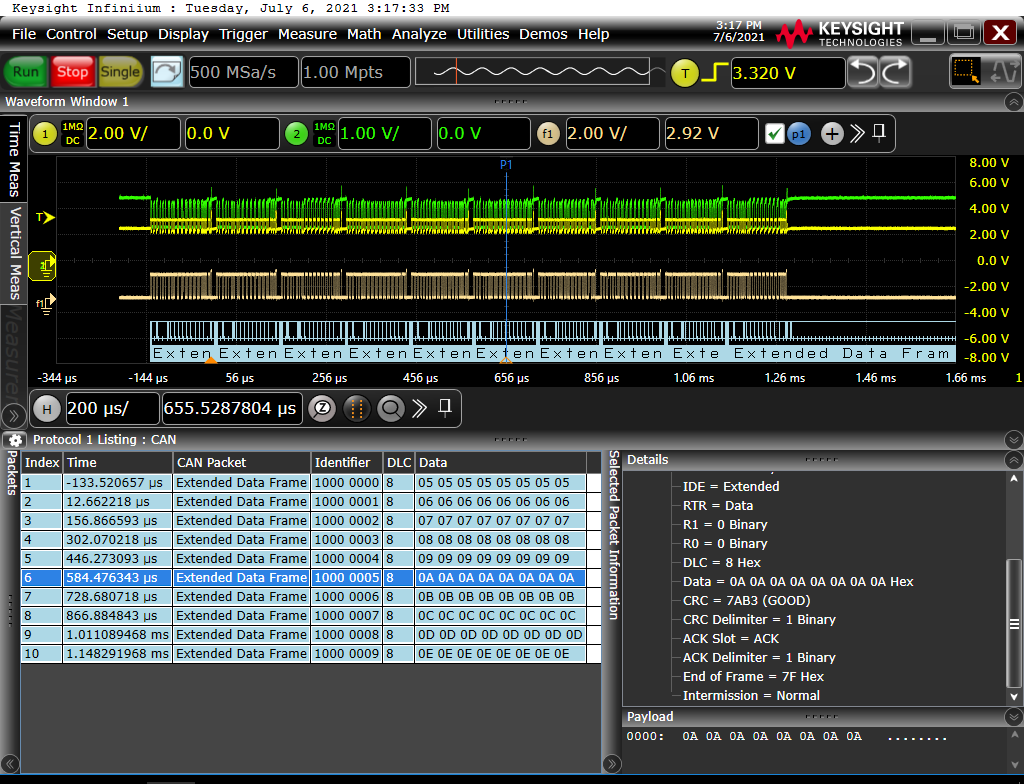
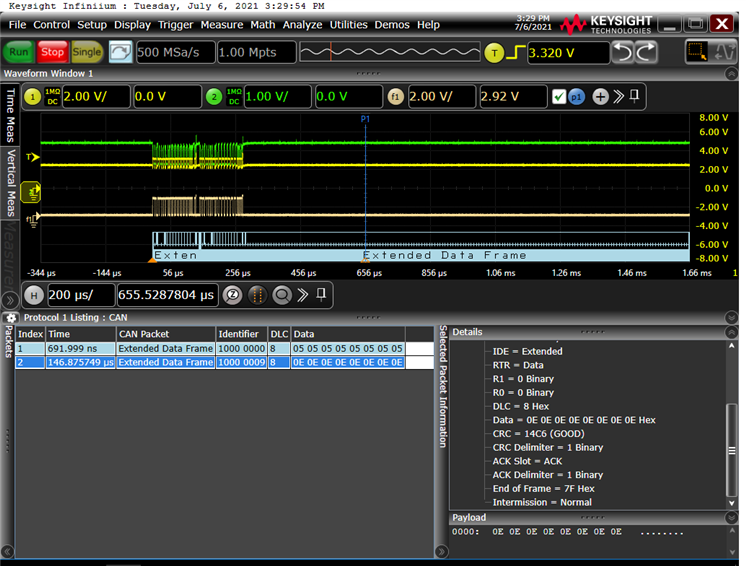
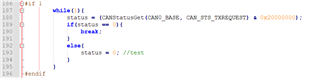
在第186行中将#if 设置为1时的 CAN 总线状态在附件"TI.png"中指示、在第186行中将#if 设置为0时的 CAN 总线状态连接在"ti2.png"中
谢谢、此致、
Kuerbis