请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PGE 主题中讨论的其他器件: EK-TM4C123GXL、 EK-TM4C1294XL、 TM4C123GH6PM
大家好
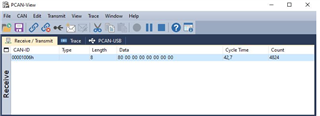
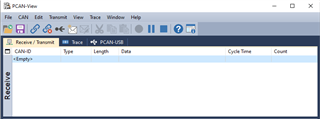
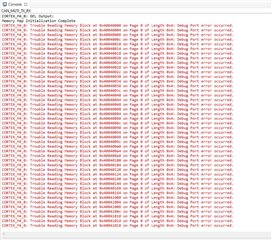
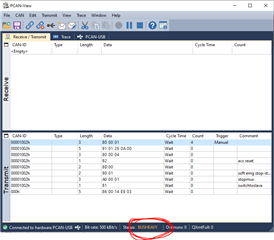
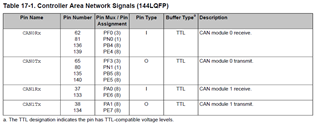
我无法通过使用 tm4c123gh6pge 设置的定制板上的 CAN0端口进行通信、但我可以使用完全相同的代码从 CAN1端口轻松进行通信。
同样、在德州开发板(tm4c1294encpdt)上、我无法通过 CAN0端口进行通信、但可以使用 CAN1使用相同的代码进行通信。
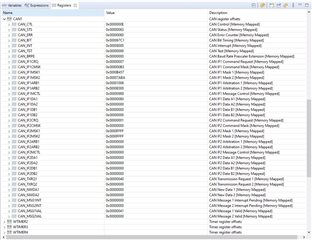
我想知道的是、我是否需要应用单独的配置来使用基于德州 MCU 的 CAN0?
谢谢、此致。