请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:EK-TM4C1294XL 主题中讨论的其他器件:EK-TM4C129EXL、 TM4C1294NCPDT
尊敬的先生:
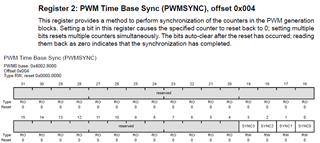
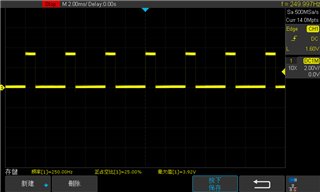
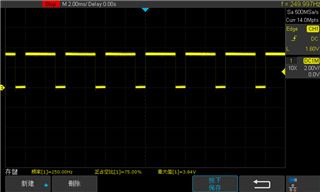
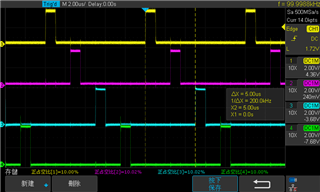
如何在两个或多个 PWM 发生器之间生成"延迟时间"、如下图所示?
4个 PWM 周期全部为100kHz、占空比为10%、"延迟时间"分别为2.5uS / 5uS / 7.5uS。
我已经尝试了函数"PWMPulseWidthSet()",但它无法正常工作!