Other Parts Discussed in Thread: HALCOGEN
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LS1224 主题中讨论的其他器件:HALCOGEN
我想知道在 CCS 中将 MibSPI/CAN 引脚配置为 GPIO (输入/输出)。 我需要在 Halcogen 中配置什么?
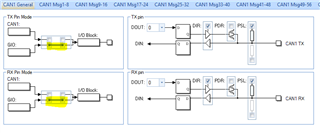
CAN1TX AS 的输入引脚(GIO)
CAN1RX AS 的输入引脚(GIO)
N2HET1[24]/MIBSPI1NCS[5] AS '输入引脚'(GIO)
MIBSPI1NENA/N2HET1[23]/ECAP4作为'输出引脚'(GIO)
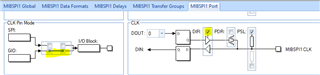
MIBSPI5SOMI[0] as'输出引脚'(GIO)
MIBSPI5CLK AS 的输入引脚(GIO)
此外,如何使特定引脚成为 MIBSPI5CLK 输出 A“Logic High”。
我们非常感谢示例代码、但我可以理解是否有任何可用的代码。 一般说明可以、我将会对它们进行 mudme.