请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GE6PM Thread 中讨论的其他器件:EK-TM4C123GXL
工具/软件:Code Composer Studio
您好!
我目前正在尝试使用 Tiva C TM4C123G Launchpad 来使用中断来检测函数发生器输入的上升沿。
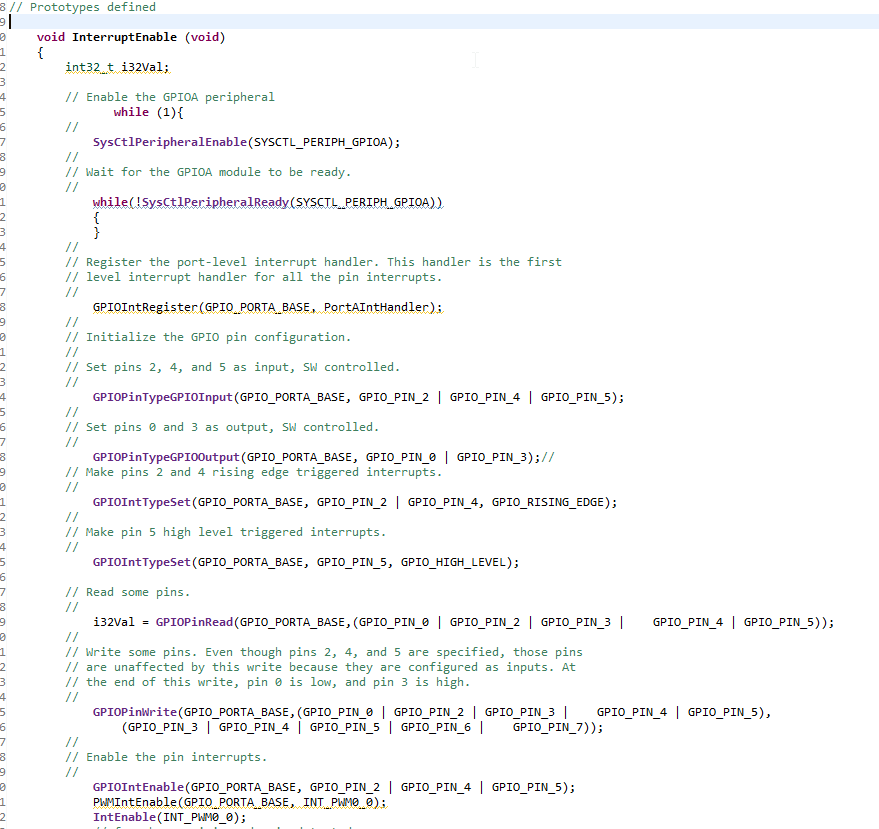
到现在为止、我正在调用下面的中断函数来执行一个中断。 调试程序时、程序卡在 interrupt.c 文件中、这是否正常?
此外 、我甚至不确定这是否是调用/使用中断的正确方法。 我已经生成的代码大多数基于示例代码、因此我们非常感谢您的帮助。
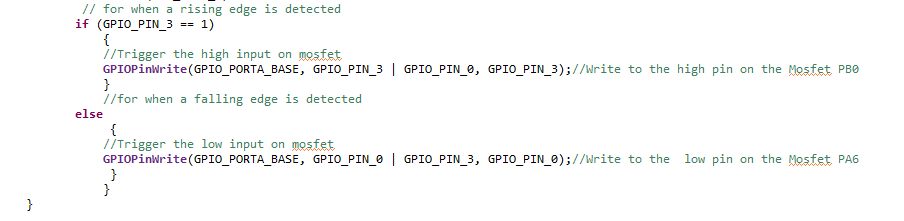
这是我正在调用的中断函数。。