请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:EK-TM4C123GXL 您好!
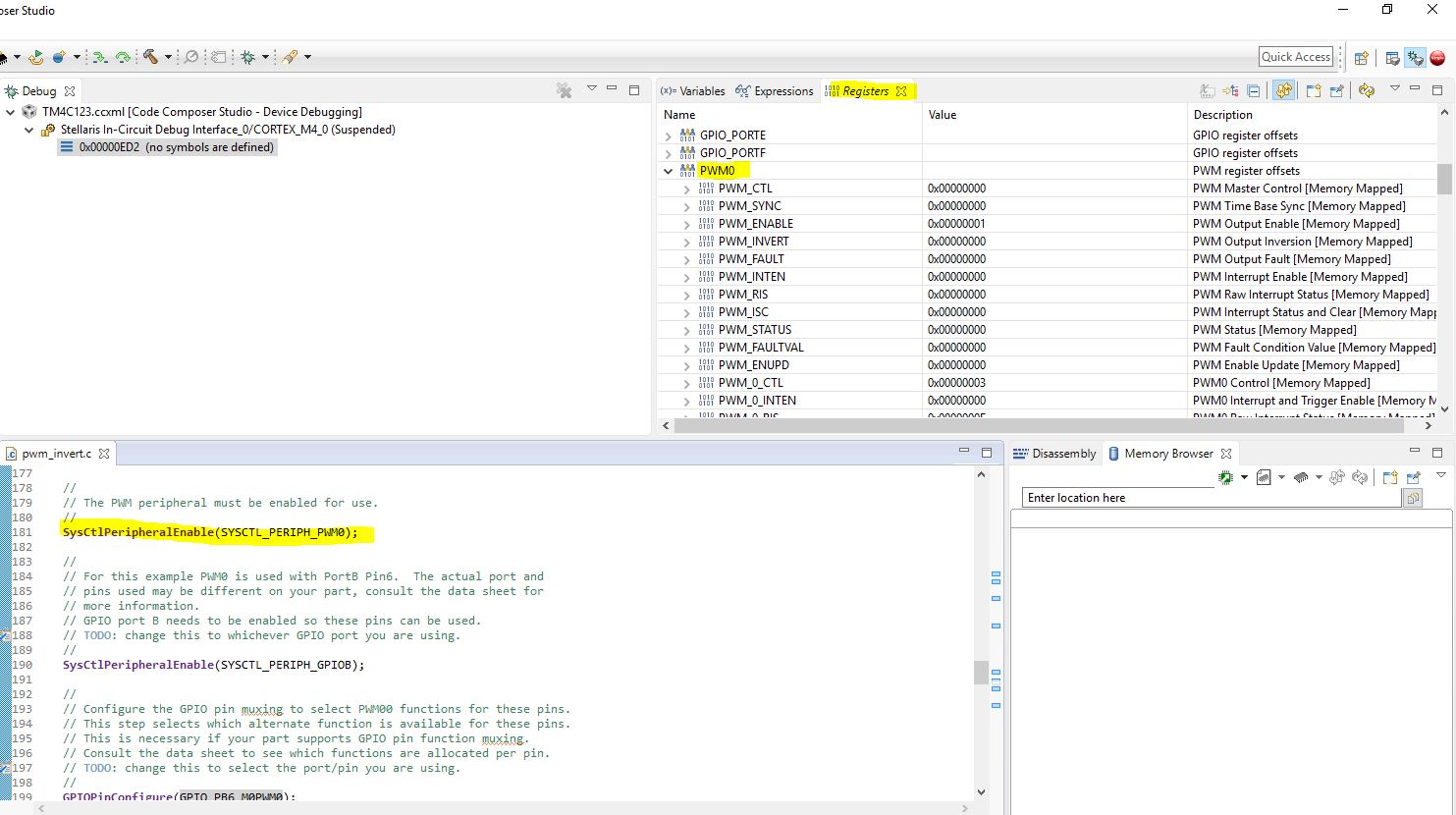
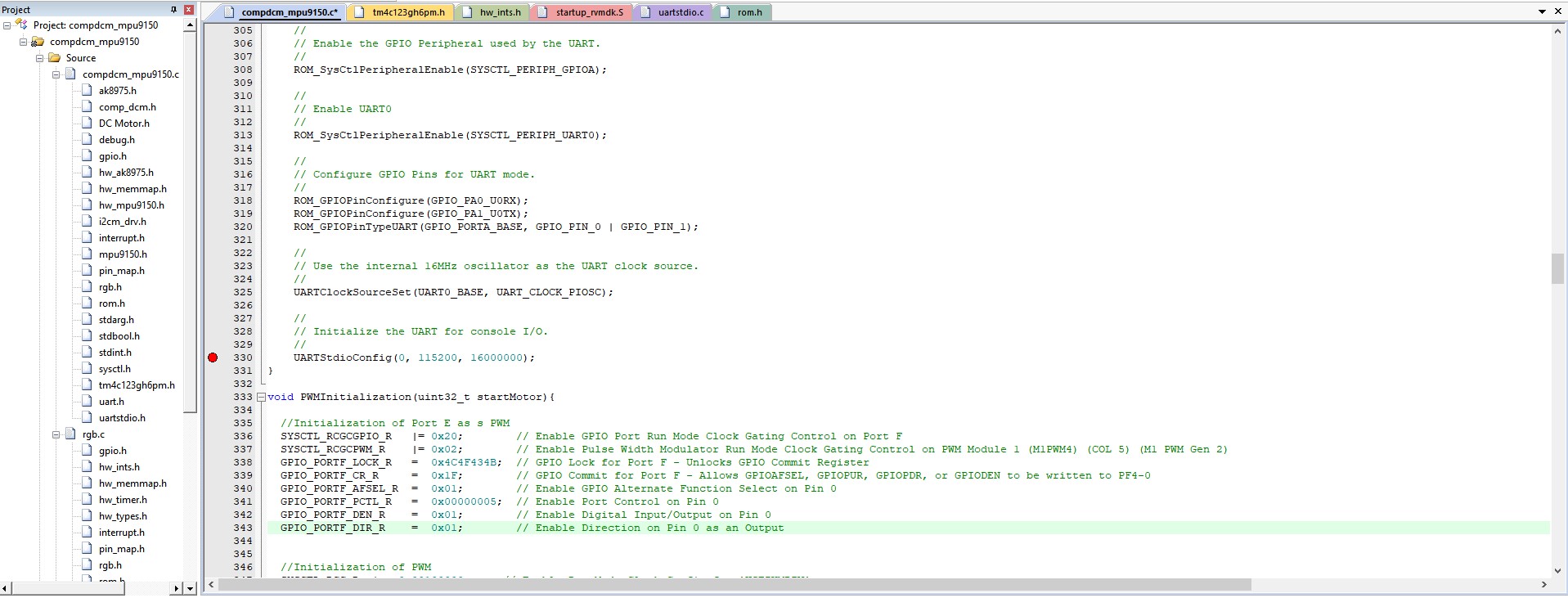
我目前正在将 TM4C123GXL 与传感器集线器的陀螺仪结合使用。 但是、我希望能够将陀螺仪与 PWM 一起使用、并在特定的角度产生特定的 PWM 输出。 编码不是我的问题、事实上、当我调试时、没有需要评估的 PWM 寄存器。 我正在使用 TI 文件夹中包含的 compdcm_mpu9150文件。
我只是想能够使用陀螺仪和 PWM。
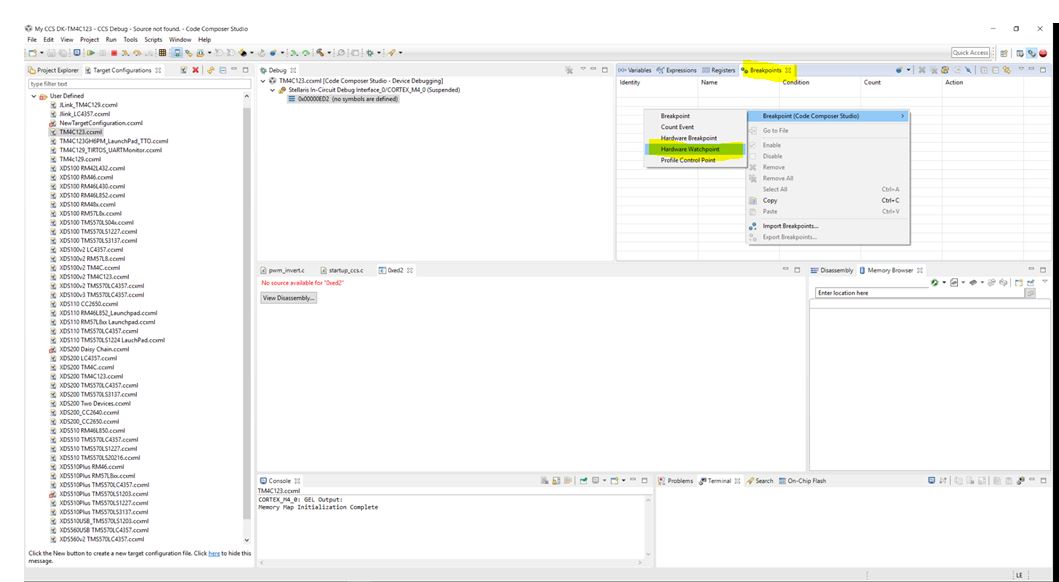
还有人有这个问题吗? 如果是、我将如何启用我的 PWM 寄存器以便我可以使用它们?
提前感谢您。
Mitchell