请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 主题中讨论的其他器件:HALCOGEN
我已经学习了 HET IDE 教程、希望实现一个相对简单的时钟发生器。
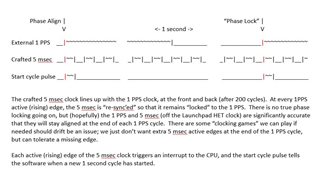
从外部生成的1 PPS 时钟、我想生成一个5毫秒50%占空比周期时钟、该时钟与1 PPS 时相位对齐(并希望"锁定")。
我之前使用的 LaunchPad HET PWM 项目产生了一个5毫秒的时钟(生成了 CPU 的周期性中断)、但它没有任何方法来与外部1 PPS 时钟对齐。 因此、HET IDE 的使用是合适的。 HET PWM 项目中的 hL_het.c 中的微代码似乎比我需要的"肉"更多、因此我不确定是否存在"反向工程"(是否存在任何 HET 反汇编器?) 提供的注释表明这是适当/有用的。
是否有任何 HET IDE 项目可以帮助我快速完成此操作? 我在算法库中看到了一些内容、包括 PWM 项目、但它们看起来比我需要的任何内容都要花哨。
我将尝试更熟悉 HET 指令和引擎、但如果 我能找到一个足够接近的轮子作为起点、我不是一个重新发明轮子的人。
非常感谢。