Other Parts Discussed in Thread: IWR1642, AWR1642, TIDEP-0090
主题中讨论的其他器件:IWR1642、 AWR1642、 TIDEP-0090
大家好! 我想我需要你的帮助。
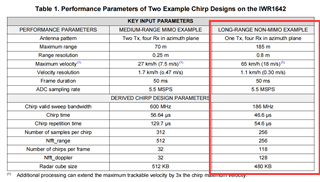
由于测试需要、希望雷达在80-90米处具有更好的检测精度、并能观察车辆停放情况。
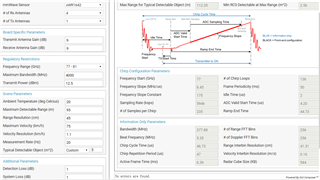
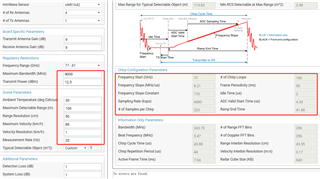
因此、我设置了一个引用毫米波传感估算器的文件、如下所示
sensorStop
FlushCfg
DfeDataOutputMode 1
通道配置15 1 0
ADCfg 2 1.
AdcbufCfg 0 1 1
ProfileCfg 0 77 2 4.20 41.88 0 8.21 1 223 6080 0 48
线性调频脉冲配置0 0 0 0 0 0 0 0 1
帧配置0 120 0 50 1 0
低功耗0 1
guiMonitor 1 0 0 0
cfarCfg 4 12 2 16 8 4 0 63 0 1
DoaCfg 3 0 1047 3 600 10 100
跟踪配置1 0 250 1 0 0 0 90
CompRangeBiasAndRxChanPhase -0.0438848 0.12320 -0.62793 0.08932 -0.50342 -0.03458 -0.58853 0.06812 -0.69101 -0.79391 -0.60803 -0.63580 -0.45255 -0.70901 -0.26627 -0.73044 -0.46078
sensorStart
借助此配置文件、我的雷达可以跟踪远离雷达的车辆、最大跟踪距离为113米。 但是、可以识别雷达附近车辆的第一个位置是90米。 理论上、它应该能够从100米处出现。 为什么?
我有以下问题:
【1】我的设置有什么问题?
【2】您能否询问是否有用于描述和设置 cfg 文件所有参数的参考文档?
【3】关于增加80-90米处的点云数量、除了修改上述文件外、其他哪些相关参数会影响检测效果
我真的希望能得到任何人的帮助,我非常感谢!
此致、
CTC