请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 主题中讨论的其他器件:HALCOGEN
您好!
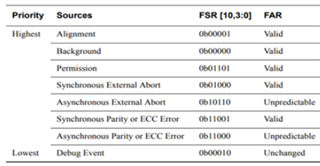
我目前 正在通过 FreeRTOS 系统使用看门狗模块。 在 main 中、我使用 dwInit()和 dwdCounterEnable 来初始化和启用看门狗。 然后、在任务中、我重置看门狗、但当我在另一个任务中使用无穷大环路对此进行测试时 、看门狗不起作用。 是否有任何将看门狗与 FreeRTOS 配合使用的示例?
提前感谢。