

Other Parts Discussed in Thread: HALCOGEN
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 主题中讨论的其他器件:HALCOGEN
我一直在尝试在我的 Hercules Launchpad 板上设置 CAN、但我没有成功。 我学习 了本教程 ,但没有成功。 您可以在下面看到我的所有 HALCOGEN 配置和代码。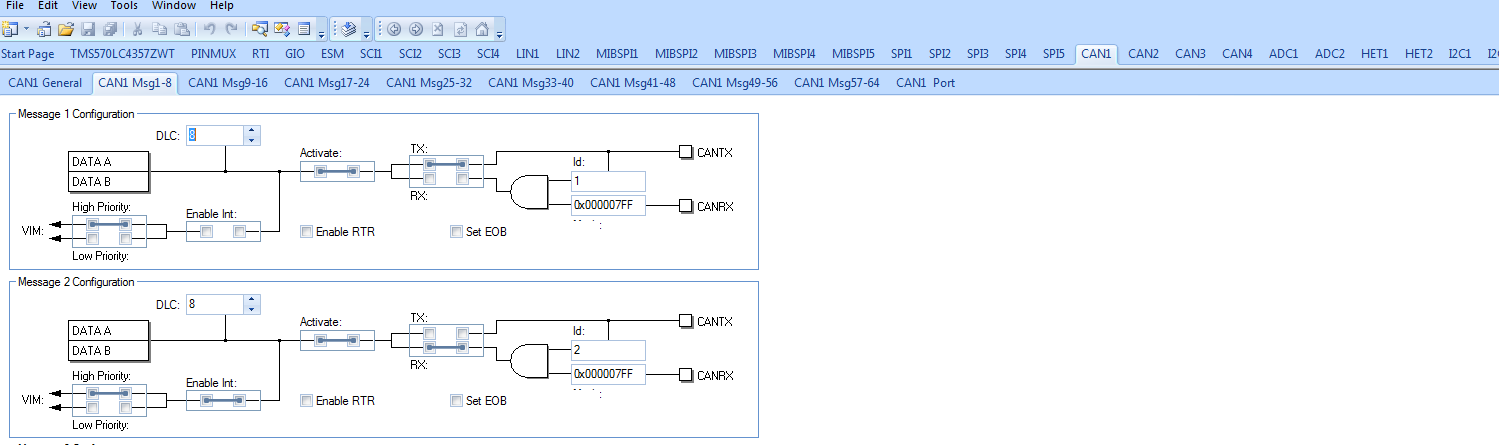
uint8_t txtFailedMessage[]={"发送 CAN 消息失败:"}; uint8_t txtReceivedMessage[]={"\n 刚刚接收到消息\n"}; void CAN_init (void){ uint8_t txtCanInit[]={"初始化 CAN"}; sciDisplayText (sciREGx、txtCanInit、strlen (((char*) txtCanInit)); canInit(); } void CAN_SEND (uint8_t *消息){ if (canTransmit (canREG1、canMESSAGE_BOX1、message)= 0){ sciDisplayText (sciREGx、txtFailedMessage、strlen ((char*) txtFailedMessage)); while (1){ ; } }否则{ sciDisplayText (sciREGx、message、strlen ((char*) message)); } } void canMessageNotification (canBASE-t *节点、uint32 MessageBox){ sciDisplayText (sciREGx、txtReceivedMessage、strlen (((char*) txtReceivedMessage)); return; } void canStatusChangeNotification (canbase_t *节点、uint32通知){ return; } void canErrorNotification (canBASE-t *节点、uint32通知){ 返回; }
