Other Parts Discussed in Thread: TM4C1294NCPDT
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 工具/软件:Code Composer Studio
您好!
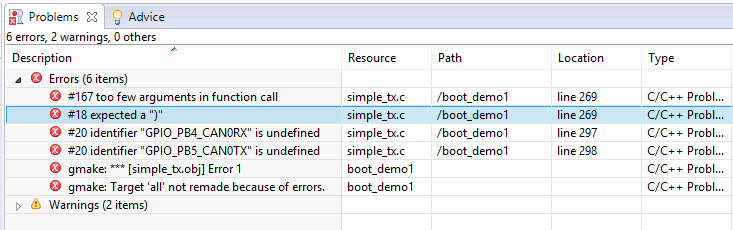
我正在尝试连接 TM4C1294开发板中的 CAN。 我在路径 C:\ti\TivaWare_C_Series-2.1.3.156\examples\peripheral\can 中找到了 CAN 示例程序。 项目中的配置是什么、或者要在程序中完成哪些更改来构建此程序。 因为通过复制粘贴、我已经尝试过很多次、但不能通过为初学者介绍视频 Code Composer 中的过程来构建。