

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 工具/软件:Code Composer Studio
你(们)好
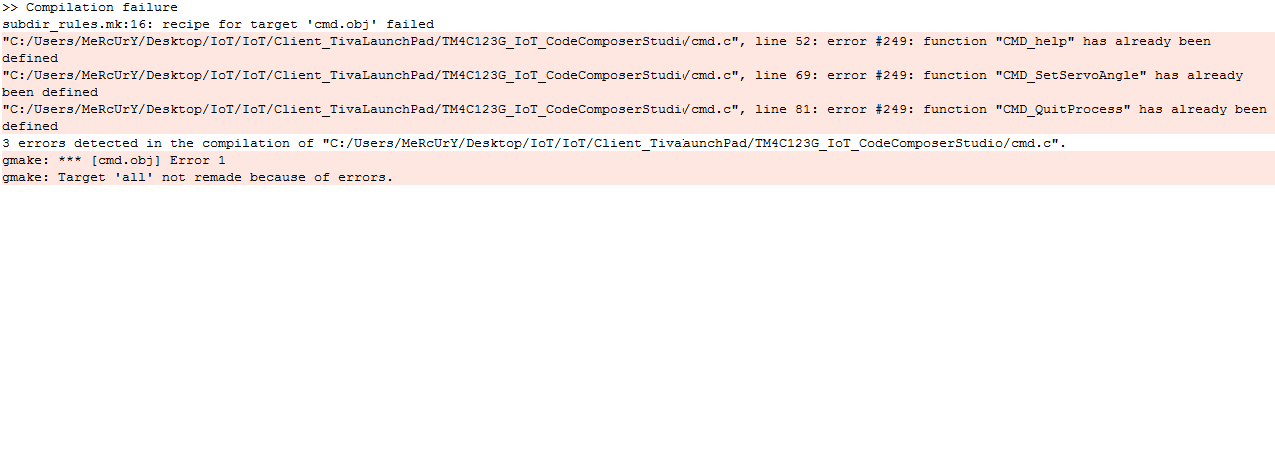
我想使用 ZigBee Wi-Fi 模块将数据从 TM4C123GH6PM 传输到手机。 但是、在 CCS 中编译代码、我遇到3个错误(所有错误都是相似的)函数已定义。
cmd.c 代码
//
//版权所有(c) 2012-2013 Texas Instruments Incorporated。 保留所有权利。
//软件许可协议
//
//德州仪器(TI)提供此软件仅供
和//仅供 TI 的微控制器产品使用。 软件归
// TI 和/或其供应商所有,并受适用的版权
//法律保护。 您不能将此软件与"病毒"开源
//软件组合在一起以形成更大的程序。
//
//此软件按“原样”提供,且存在所有故障。
//对于
本软件,不作任何明示、暗示或法定的保证,包括但不限于对适销性和适用性的暗示保证//特定用途。 在任何
//情况下、TI 不对任何
原因造成的特殊、意外或必然//损害负责。
//
//这是 EK-TM4C123GXL 固件包修订版1.0的一部分。
////
*****************
#include
#include
#include "main.h"
#include "inc/hw_types.h"
#include "utils/ustdlib.h"
#include "utils/uartstdio.h"
#include "utils/cmdline.h"
#include "cmd.h"
//*********
//
///有效命令字符串、回调函数和帮助消息的表。 此
//由 cmdline 模块使用。
////
*****************
/*tCmdLineEntry g_psCmdTable[]=
{
{"帮助"、 CMD_Help、 ":显示命令列表"},
{"SetAngle"、 CMD_SetServoAngle、 ":设置伺服角度"},
{"CloseConnection"、 CMD_QuitProcess、 “:关闭连接”},
{0、0、0}
};
*/
/*********
//
//命令:帮助
//
//打印所有命令的帮助字符串。
////
*****************
int CMD_help (int argc、char **argv)
{
int32_t i32Index;
(无效) argc;
(无效) argv;
i32Index = 0;
UARTprintf ("命令列表\n");
while (g_psCmdTable[i32Index].pcCmd)
{
UARTprintf ("%17s %s\n"、g_psCmdTable[i32Index].pcCmd、
g_psCmdlTable[i32Index].pcHelp);
i32Index++;
}
UARTprintf ("\n");
return (0);
}
int CMD_SetServoAngle (int argc、char ** argv)
{
uint32_t tooAngle;
if (argc =2)
{
ServoAngle = usterServl (argv[1]、0、10);
SetServoAngle (ServoAngle);
}
return 0;
}
int CMD_QuitProcess (int argc、char **argv)
{
QuitProcess ();
return 0;
}
cmd.h 文件
// //版权所有(c) 2012-2013 Texas Instruments Incorporated。 保留所有权利。 //软件许可协议 // //德州仪器(TI)提供此软件仅供 和//仅供 TI 的微控制器产品使用。 软件归 // TI 和/或其供应商所有,并受适用的版权 //法律保护。 您不能将此软件与"病毒"开源 //软件组合在一起以形成更大的程序。 // //此软件按“原样”提供,且存在所有故障。 //对于 本软件,不作任何明示、暗示或法定的保证,包括但不限于对适销性和适用性的暗示保证//特定用途。 在任何 //情况下、TI 不对任何 原因造成的特殊、意外或必然//损害负责。 // //这是 EK-TM4C123GXL 固件包修订版1.0的一部分。 //// ***************** #ifndef __RGB_commands_H__ #define __RGB_commands_H__ //********* // //为作为 // TivaWare 标准部分提供的命令行参数解析器定义。 QS-RGB 应用使用命令行解析器将 //功能扩展到串行端口。 //// ***************** #define CMDLINE_MAX_args 3 //********* // //实现命令行 //功能的回调函数声明。 在 命令行中键入相应的命令时,命令行解释器//会调用这些函数。 //// ***************** extern int CMD_help (int argc、char **argv); extern int CMD_SetServoAngle (int argc、char **argv); extern int CMD_QuitProcess (int argc、char **argv); #endif
下面我要附上控制台窗口的屏幕截图。
我们非常感谢您的任何帮助。
