工具/软件:Code Composer Studio
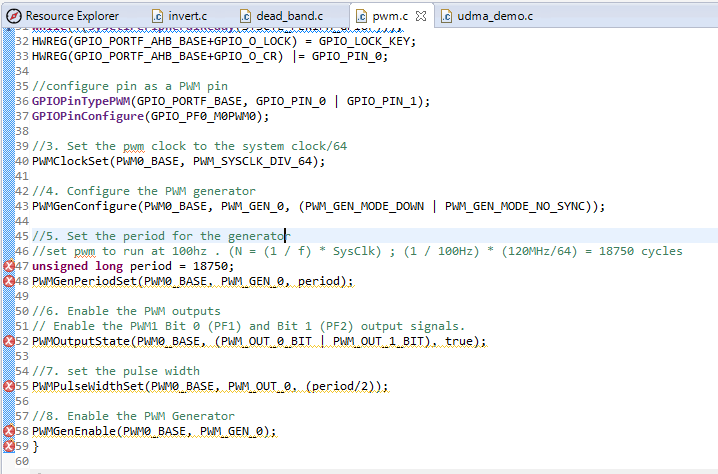
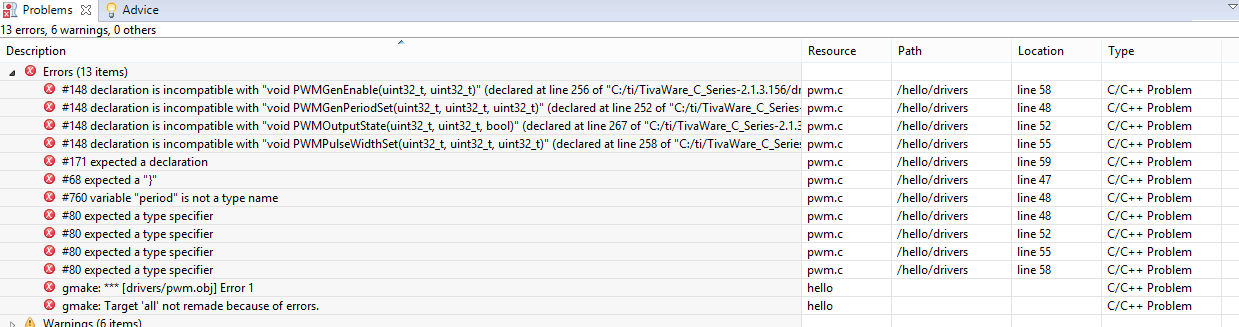
这是用于 PWM 的驱动程序。 我找到了如下错误。
#include
#include
#include "inc/hw_types.h"
#include "inc/hw_gpio.h"
#include "inc/hw_memmap.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/pwm.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
#include "drivers/pinout.h"
#include "driverlib/rom_map.h"
//系统时钟变量
uint32_t g_ui32SysClock;
int main (void){
//1. 将时钟设置为以25MHz 的频率从晶体运行
G_ui32SysClock = MAP_SysCtlClockFreqSet ((SYSCTL_XTAL_25MHz | SYSCTL_OSC_MAIN \
| SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480)、120000000);
//2. 使用启用系统控制中的 PWM 模块
//启用外设(端口 F)
SysCtlPeripheralEnable (SYSCTL_Periph_PWM0);
SysCtlPeripheralEnable (SYSCTL_Periph_GPIOF);
//2b. 机密级别;解锁端口 F0以便我们可以使用它!!! >=O
while (!(SysCtlPeripheralReady (SYSCTL_Periph_GPIOF)));
HWREG (GPIO_PORTF_AHB_BAS+GPIO_O_LOCK)= GPIO_LOCK_KEY;
HWREG (GPIO_PORTF_AHB_BAS+GPIO_O_CR)|= GPIO_PIN_0;
//将引脚配置为 PWM 引脚
GPIOPinTypePWM (GPIO_PORTF_BASE、GPIO_PIN_0 | GPIO_PIN_1);
GPIOPinConfigure (GPIO_PF0_M0PWM0);
//3. 将 PWM 时钟设置为系统时钟/64
PWMClockSet (PWM0_BASE、PWM_SYSCLK_DIV_64);
//4. 配置 PWM 发生器
PWMGenConfigure (PWM0_BASE、PWM_GEN_0、(PWM_GEN_MODE_DOWN | PWM_GEN_MODE_NO_SYNC);
//5. 设置发生器的周期
//将 PWM 设置为以100Hz 的频率运行。 (n =(1 / f)* SYSCLK);(1 / 100Hz)*(120MHz/64)= 18750个周期
无符号长整型周期= 18750;
PWMGenPeriodSet (PWM0_BASE、PWM_GEN_0、PERIOD);
//6. 启用 PWM 输出
//启用 PWM1位0 (PF1)和位1 (PF2)输出信号。
PWMOutputState (PWM0_BASE、(PWM_OUT_0_BIT | PWM_OUT_1_BIT)、true);
//7. 设置脉冲宽度
PWMPulseWidthSet (PWM0_BASE、PWM_OUT_0、(周期/2));
//8. 启用 PWM 发生器
PWMGenEnable (PWM0_BASE、PWM_GEN_0);
}
错误是这样的
在程序的这个区域中标记错误、如下所示。