

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1290NCPDT 客户使用25MHz 晶体运行并尝试确定它对 TM4C1290NCPDT PLL 稳定性/漂移的影响、以及它对 CAN 控制器的影响 、以便回答以下问题:
以获得 PLL 创纪录的最大漂移。 如果使用 PLL、则记录 PLL 和基极振荡器的容差
具有25MHz 晶体的应用
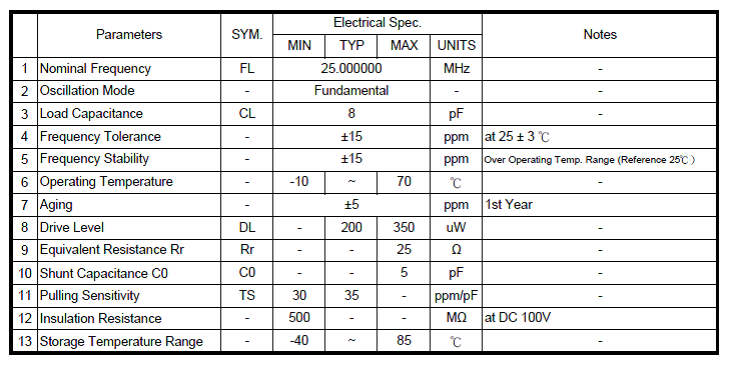
他们担心、根据其计算结果、存在1%的漂移、这违反 了500K CAN 上+/- 0.4%的 CAN 协议。 PLL 配置为480MHz、M = 96、N = 5、参考频率为5MHz
