请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PGE 主题中讨论的其他器件:TM4C123、
你好
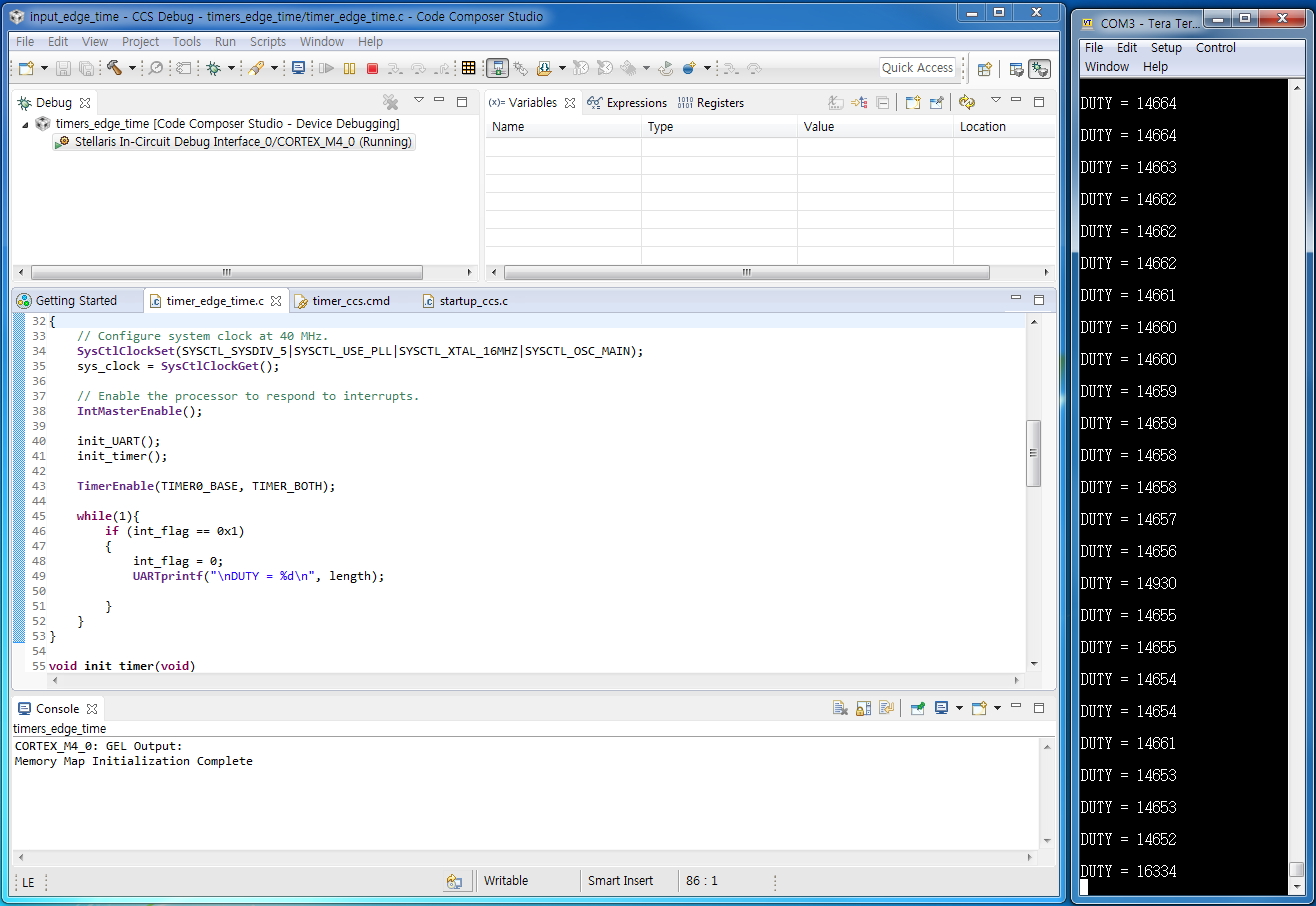
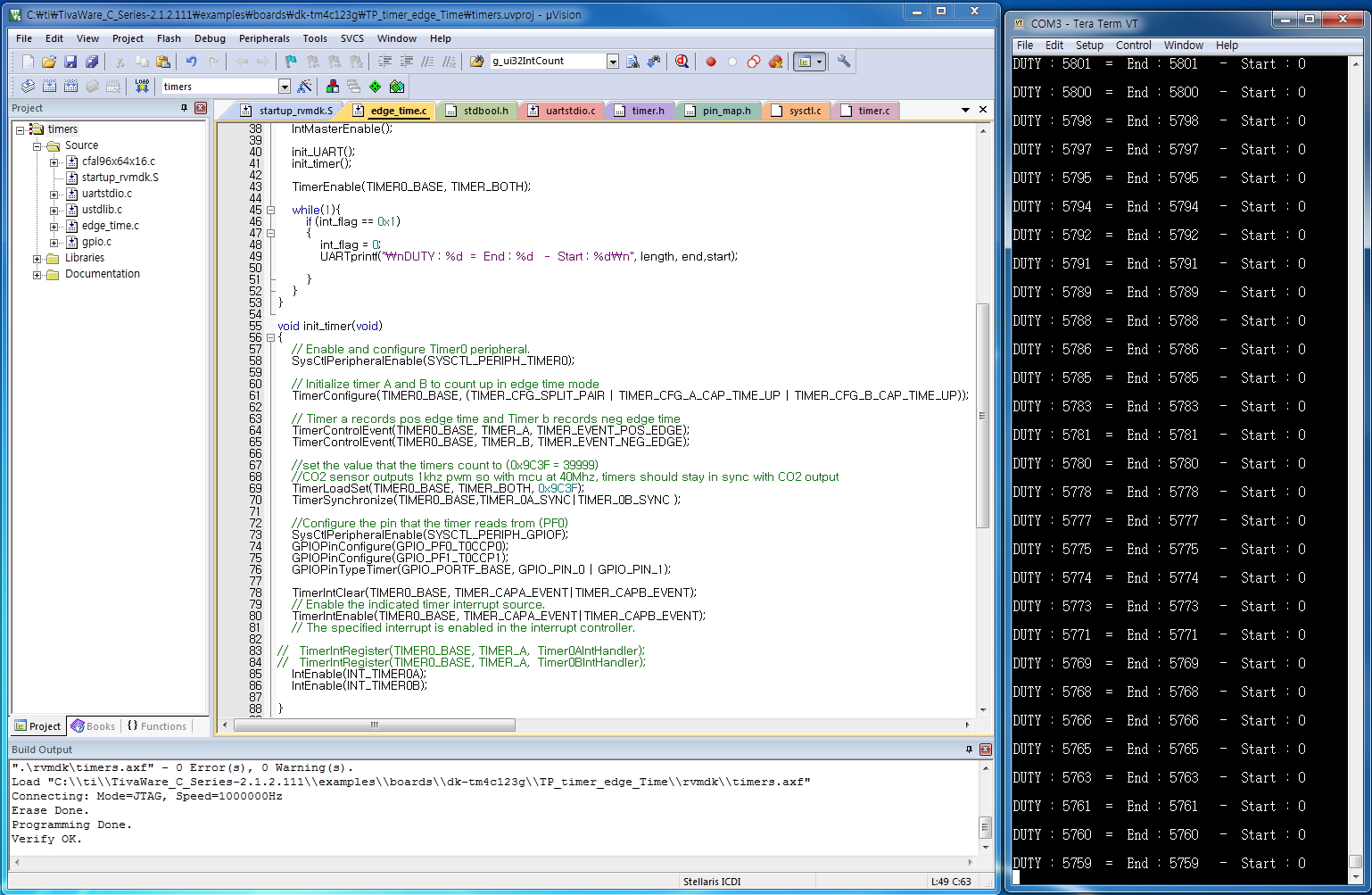
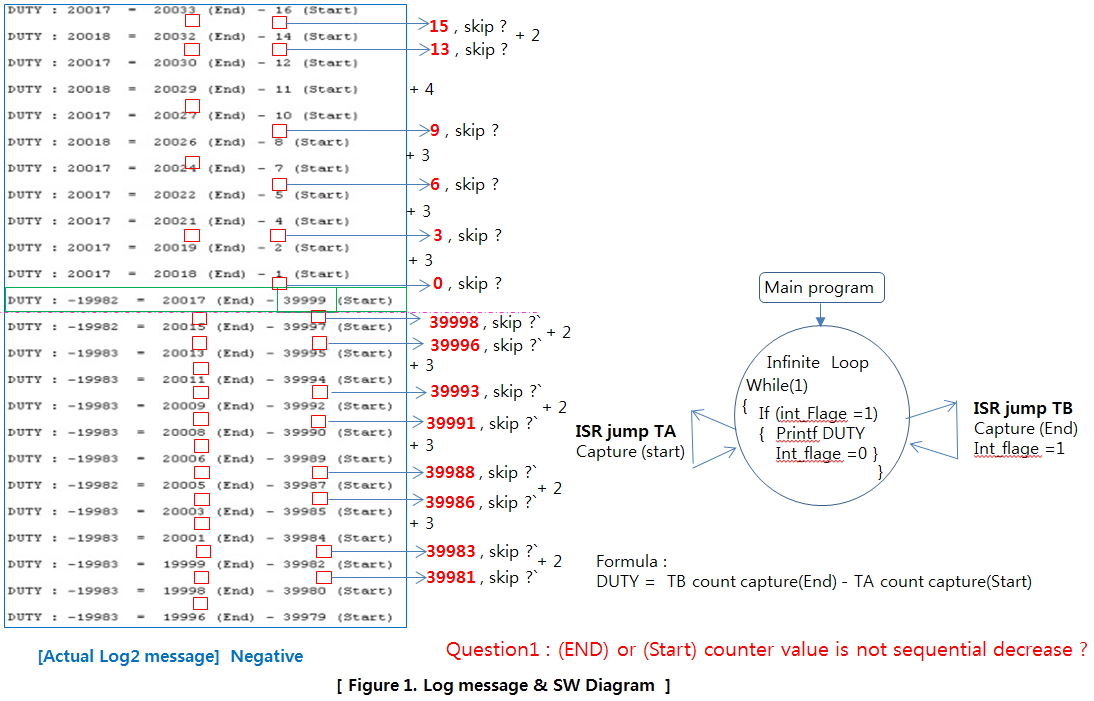
需要输入边沿定时器采样源代码。
Peripherals 文件夹中没有示例文件。 ( EDGE_COUNT、 OneShot_16位、 Periode_16位、 PWM)
我需要 EDGE_TIME 示例文件。
谢谢
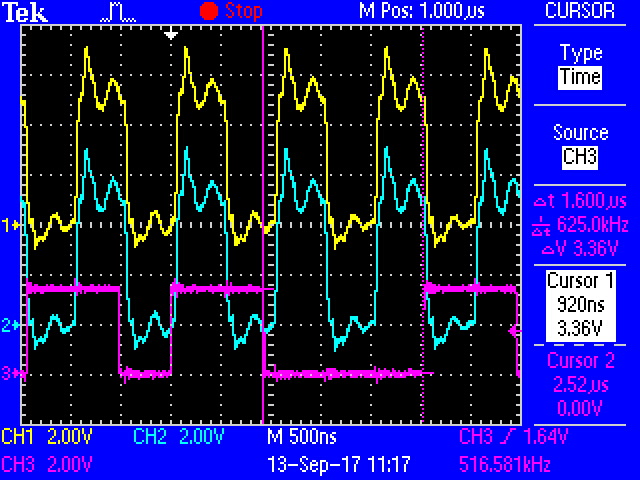
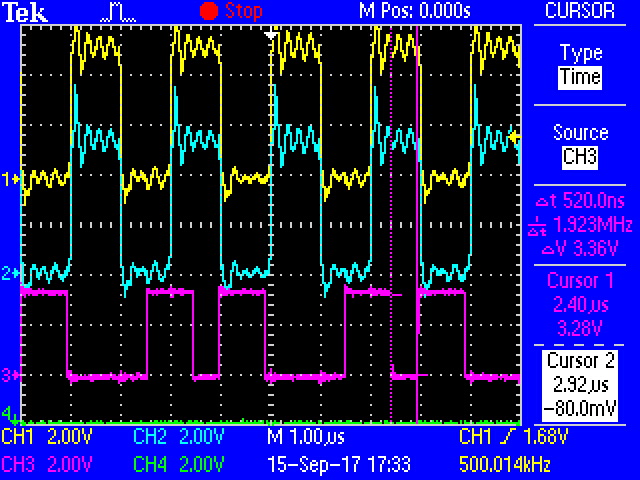
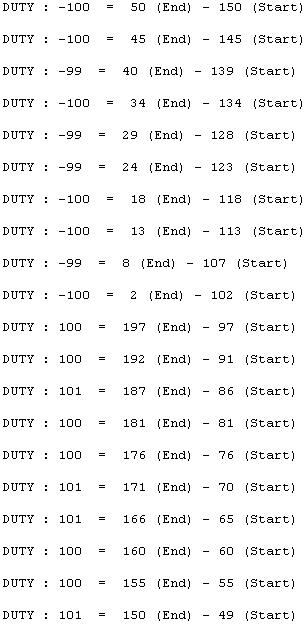
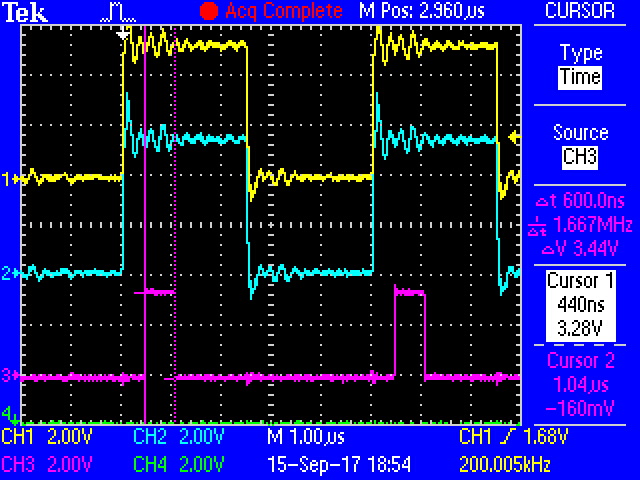
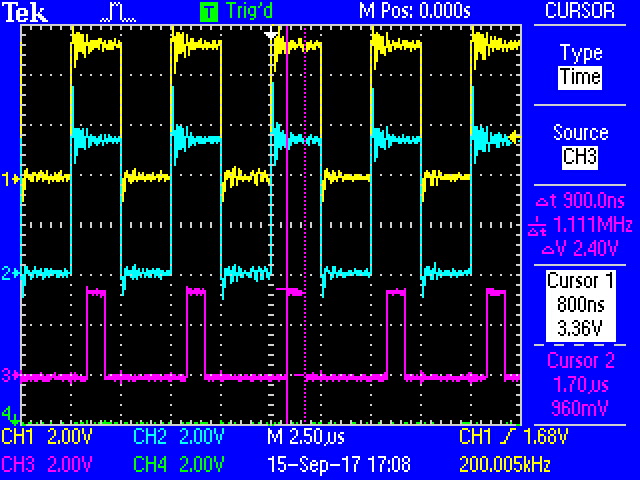
[附加所需配置的图像]

你好
需要输入边沿定时器采样源代码。
Peripherals 文件夹中没有示例文件。 ( EDGE_COUNT、 OneShot_16位、 Periode_16位、 PWM)
我需要 EDGE_TIME 示例文件。
谢谢
[附加所需配置的图像]