

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 工具/软件:TI-RTOS
你(们)好
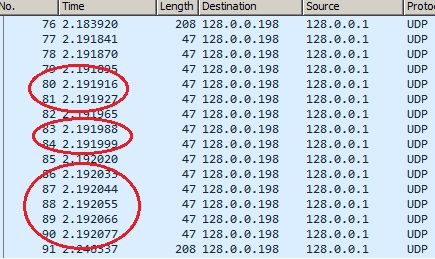
我在以太网应用中使用 TM4C1294NCPDT 芯片。 当我从 主机计算机向控制器发送多个(15)短(47字节)帧的高帧频率(帧之间为10-14微秒)时、控制器会丢失一些帧。
当我降低帧频率(在数据包之间稍微延迟)时、控制器不会错过帧。
我发现、当以太网的 DMA 将帧从以太网控制器的 RX FIFO 移动到 RAM 时、帧丢失了。 (当我发送这些数据包时、EMACMFBOC 寄存器的"错过的帧计数器"位会增加)。

来自芯片数据表:
丢失帧计数器-该域表示由于主机接收缓冲器不可用而导致控制器丢失的帧数。 每次 DMA 丢弃一个传入帧时、该计数器都会递增。 当 DMA 接受帧时、该计数器清零。
原因可能是什么?
对于 Tiva、是否存在"数据包间隙"限制?
我在我的应用 TI-RTOS 和 NDK 网络堆栈中使用。 以太网的工作速度为100 Mbps。
提前感谢。


