请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 主题中讨论的其他器件:TM4C123
大家好、
我正在尝试详细了解 TM4C123器件中的 CAN 模块、以构建 AUTOSAR CAN 驱动器(这与我的毕业项目相关)。
我想知道如何在离开 CAN 控制器的初始化状态之前配置所有硬件消息对象。 例如、如果 RX 需要16个对象、TX 需要其他16个对象。
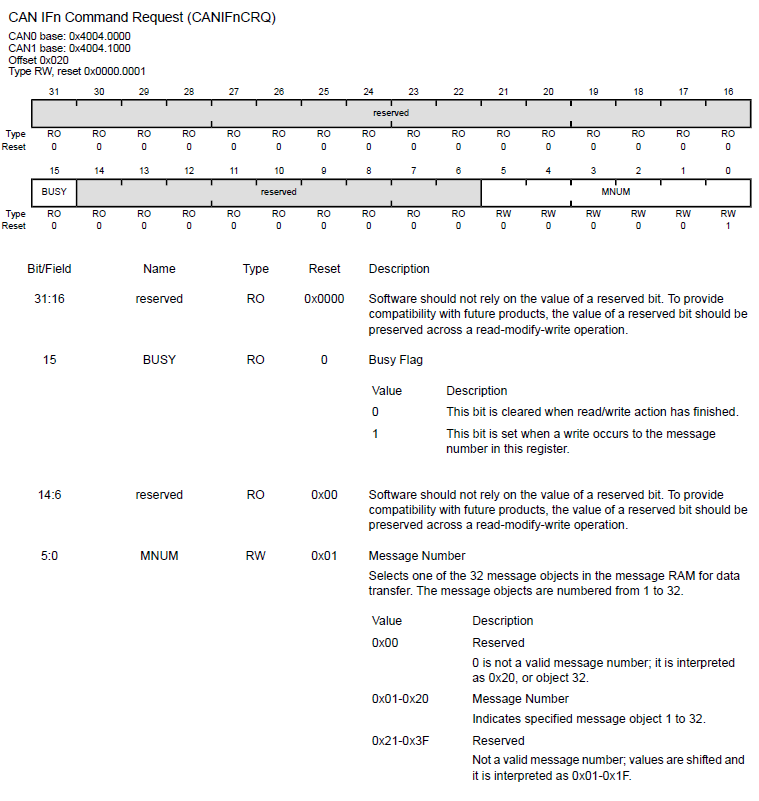
我无法理解、因为我只有2个 MNUM 字段(在2个命令 REQ 中)。 寄存器)。 如何使用唯一消息。 每个硬件消息对象的对象编号。
此致、
斯里特