

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 主题中讨论的其他器件:TM4C123
工具/软件:Code Composer Studio
您好!
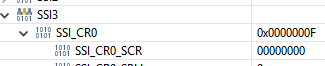
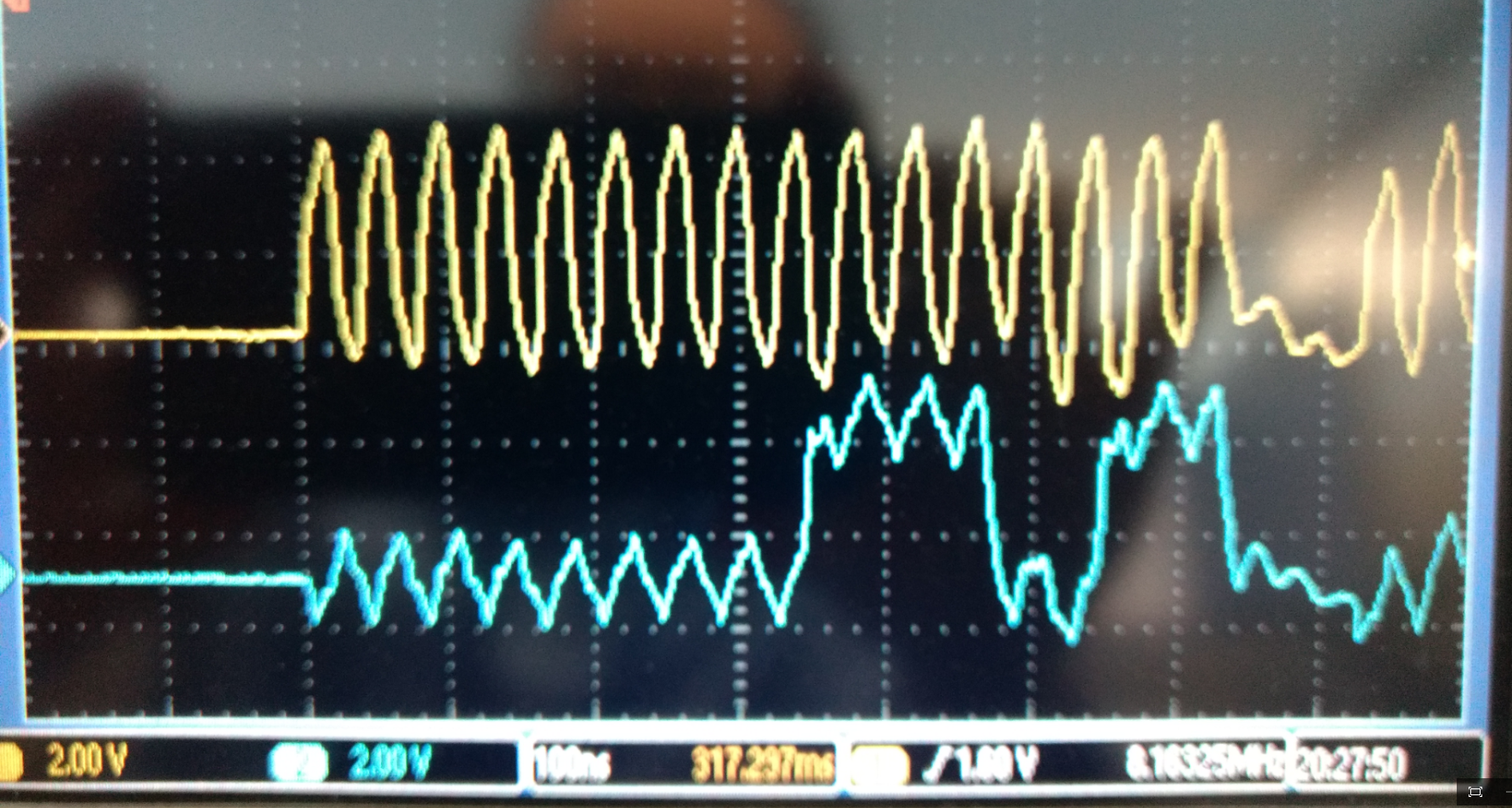
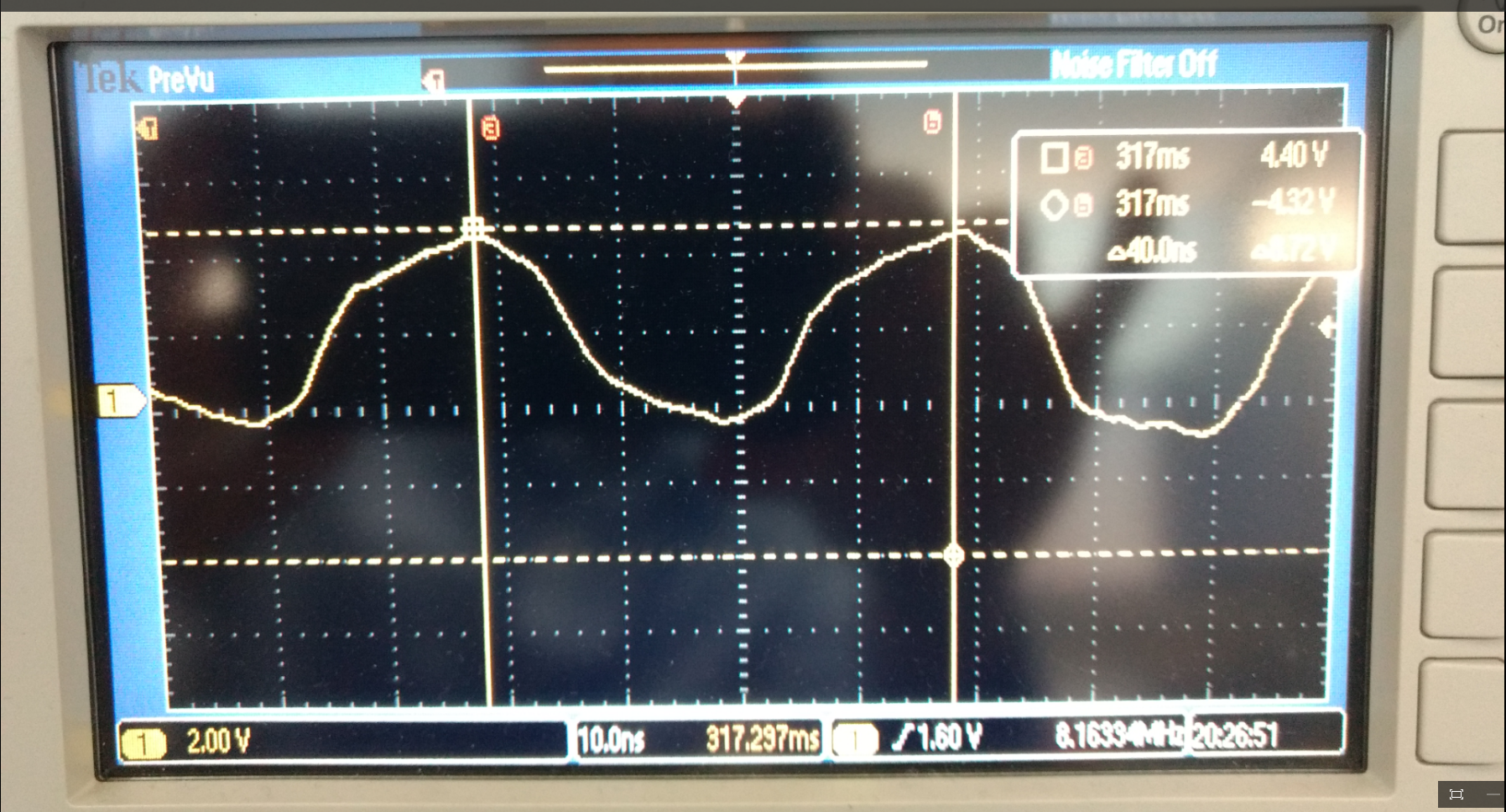
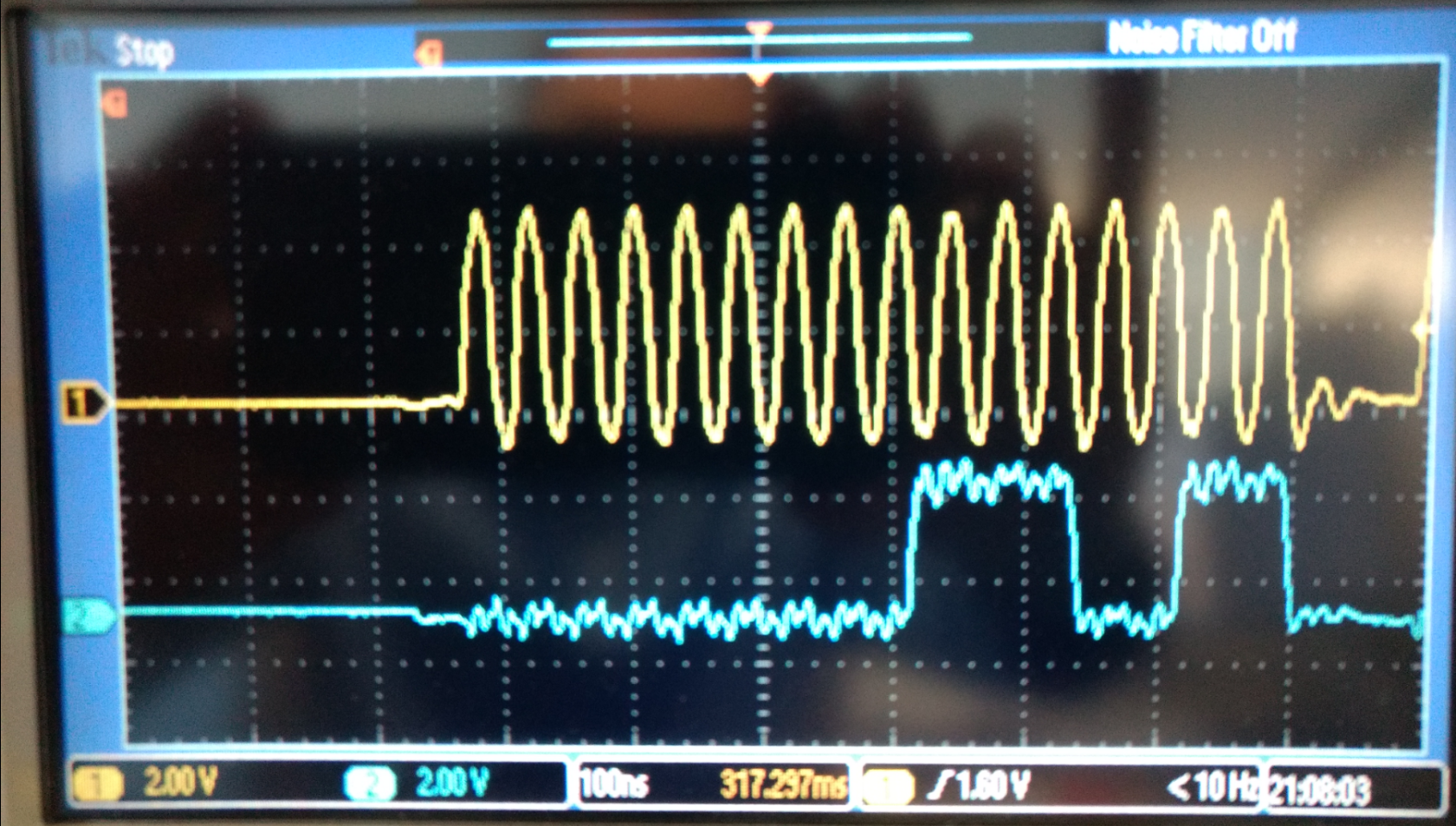
我希望使用 PLL 将 SPI 时钟的频率范围设置为25MHz。 我使用以下语句,但最多只能获得10MHz!
首先、我设置 PLL 时钟频率、以确保其超过所需 SPI 时钟的两倍、如下所示:
使用 PLL 将时钟设置为以100MHz (200MHz/2)运行。
SysCtlClockSet (SYSCTL_SYSDIV_2 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHz);
然后将 SPI 时钟设置为20MHz、如下所示:
SSIConfigSetExpClk (SSI3_base、SysCtlClockGet ()、SSI_FRF_MOTO_MOTO_0、SSI_MODE_MASTER、20000000、 16);
为什么我只获得10MHz?
谢谢、
Karim





{kind=link}