请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 工具/软件:Code Composer Studio
大家好、
我正在尝试运行一个需要超过32、768字节的特定代码。
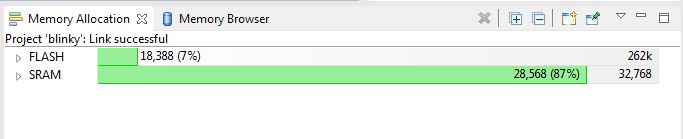
是否有某种方法可以使用空白存储器(闪存262KB 的93%)、如下图所示?
是否可以根据用户的需要对存储器进行分区? 如果是、我应该更新哪个文件?
提前感谢您的帮助
工具/软件:Code Composer Studio
大家好、
我正在尝试运行一个需要超过32、768字节的特定代码。
是否有某种方法可以使用空白存储器(闪存262KB 的93%)、如下图所示?
是否可以根据用户的需要对存储器进行分区? 如果是、我应该更新哪个文件?
提前感谢您的帮助