

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 工具/软件:Code Composer Studio
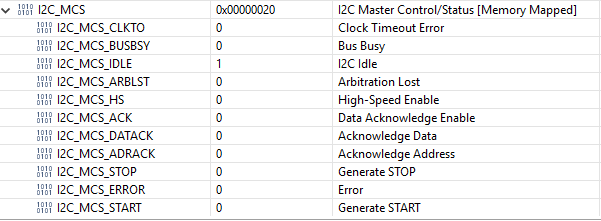
我遇到的问题是、除了 I2CMDR 和 I2CMCS 之外、所有配置都完成了、即使是写入它们的 IAM 也不会被修改
所有寄存器都有屏幕截图

工具/软件:Code Composer Studio
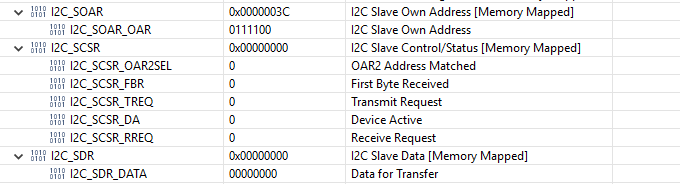
我遇到的问题是、除了 I2CMDR 和 I2CMCS 之外、所有配置都完成了、即使是写入它们的 IAM 也不会被修改
所有寄存器都有屏幕截图
