Other Parts Discussed in Thread: EK-TM4C123GXL
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PZ Thread 中讨论的其他器件:EK-TM4C123GXL
工具/软件:Code Composer Studio
您好!
- 我们尝试在 CAN 总线上通信两个 Tiva 控制器。
- 从 Tiva 库中使用的示例代码
- 一个控制器加载示例 Tx 代码。
- 另一个加载示例 Rx 代码的控制器。
问题:
通信开始时、程序进入错误状态。
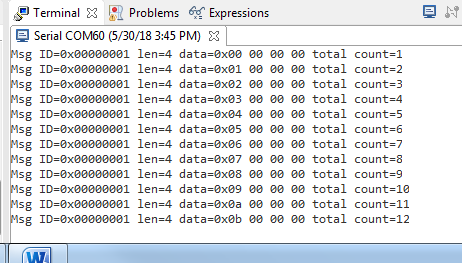
错误:
随附错误屏幕截图供您参考。
请提供进一步的建议。
谢谢、
Sunil S