请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
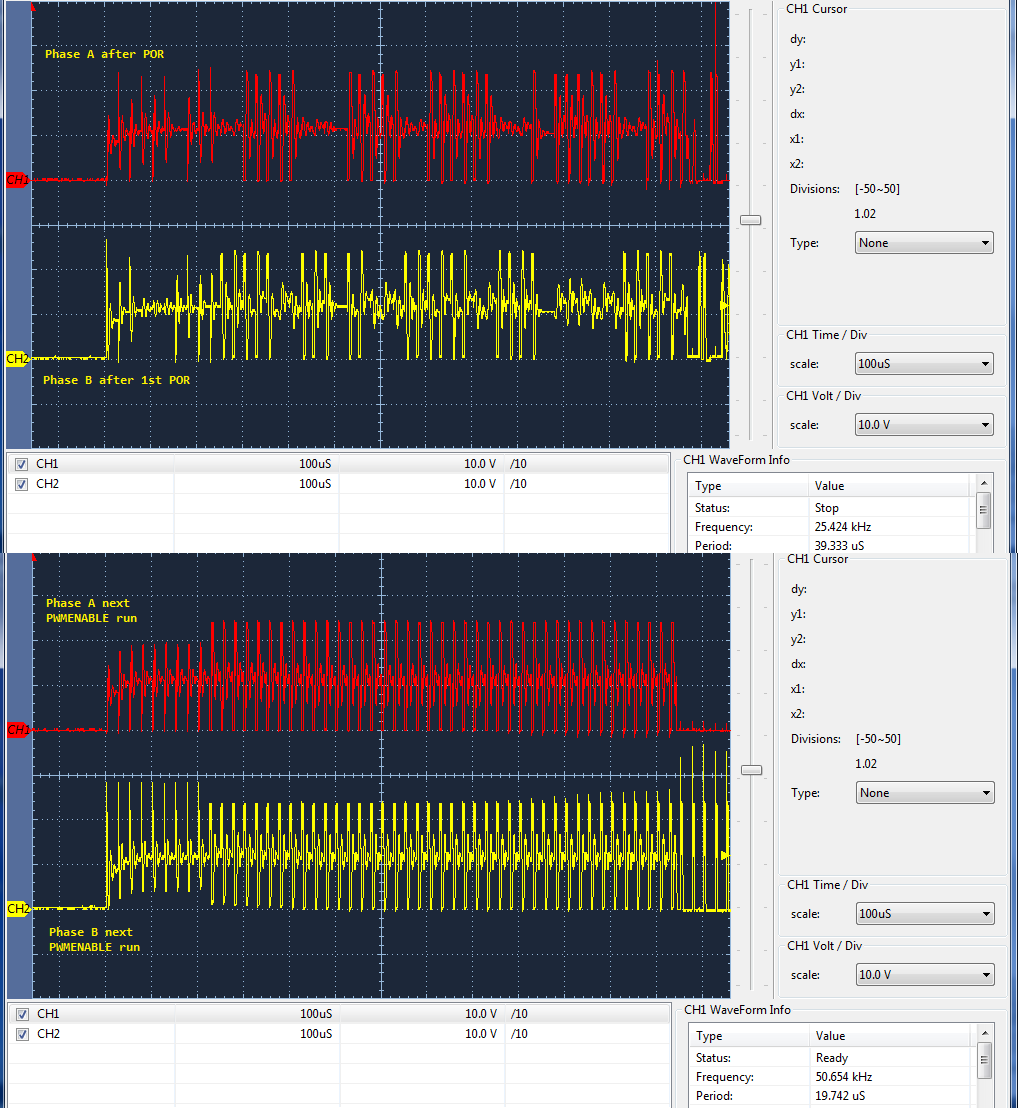
器件型号:TM4C1294KCPDT 复位或 POR 后 、PWMENABLE REG-1 门控输出 (250us)的前几个周期会在栅极驱动器输出中产生空洞。 PWM 发生器配置为递减计数同步模式、具有本地发生器死区更新和全局同步更新。 A/B 驱动器输出中的空隙在高达250us 的时间内保持一致、然后 PWM 发生器看起来是部分自校正的。
复 位或 POR 事件后、重叠无效会自动校正、 PWMENABLE 会在切换死区发生器的情况下生成输出。 尝试打开/关闭死区或使用 虚拟数据预加载 PWMENABLE 并将输出到空间不会更正 POR 之后的奇怪重叠空洞。 这表明 、无论 在配置发生器后调用 REG-2多少次、都会有 PWMSYNC REG-2时基调用不同步 GEN A/B 占空比。 复位或 POR 后、3个发生器的输出似乎没有完全同步!
为确保 PWM0发生器的前几个占空比变化 保持 A/B 重叠信号的同步、需要采取哪些措施才能确保应用程序首次使用 PWMENABLE REG1?
据认为,丢失脉冲是发电机的一个阶段问题,它与发电机直接有关,但不是原因。