请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432E401Y Thread:SYSBIOS 中讨论的其他器件
文件中找到此代码
VAR Idle = xdc.useModule('ti.sysbios.knl.Idle');
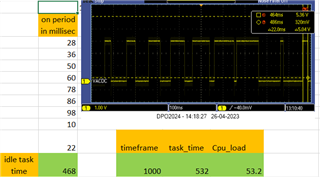
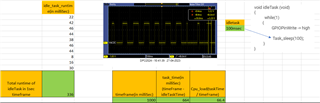
如何计算在1秒的周期内处于空闲任务的时间。
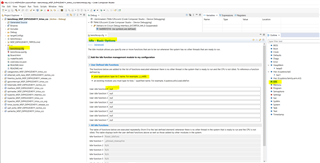
文件中找到此代码
VAR Idle = xdc.useModule('ti.sysbios.knl.Idle');
如何计算在1秒的周期内处于空闲任务的时间。