

大家好。 我会征求您的专业知识。
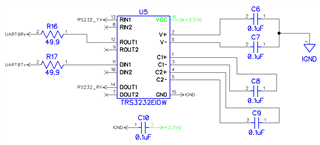
我使用 TM4C123GH6系列已经很多年了、但现在面临一个我尚未解决的问题。 我的大多数项目都是独立的、或者仅使用 UART 通过 UART 引脚调试到另一台计算机。 这是第一个需要使用一个串行(RS232)接口连接到微控制器的 UART 引脚(在本例中为 UART0)的项目。 我使用 TI TRS3232EIDW 芯片作为接口。 问题是、当我将此电路板连接到 PC (Sabrent USB 转 RS232转换器)并连接 XDS100调试接口时、我会获得我预期的串行输出、但当移除 XDS100时、串行连接将停止工作、电路板将恢复。 再次连接 XDS100不会恢复串行通信、复位电路板(将 GND 连接到 RST 引脚的复位按钮)不会执行任何操作;下电上电不执行任何操作。 要再次获得任何结果、唯一方法是使用 XDS100重新刷写电路板。
我使用 TM4C123GH6已有一段时间、以前从未遇到过此问题、因此我认为它与串行接口的使用有关。 我检查了所有的焊点、没有看到任何问题、但我确实对 UART 和接地引脚进行了回流焊以确保正确。 我检查了我的电源和 RS232接口接地(引脚5)之间的差异、它稳定在大约1mV。 我在移除 XDS100时检查了3.3V 电源轨、可以看到变化小于10mV (3.31到3.30)。 还有其他组件连接到微控制器(FRAM 和传感器各通过不同的 SSI 接口)、但这些部件在许多项目中使用过、没有问题;我在这里并不怀疑它们是个问题。
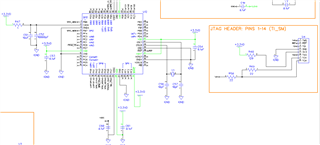
各个部分如下所示。 我省略了 FRAM 和传感器部分、因为我认为它们不会导致这个问题。
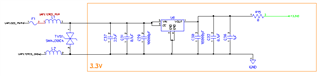
U6是一款"Ricoh、R1524H033B-T1-FE 稳压器、线性、3.3V、200mA"
作为测试、我在 CCS 中修改了 TI uart_echo.c 程序、仅监控 UART 并返回其接收到的字符、而且只要连接了串行电缆和 XDS100、该程序就会按预期工作。 但是、当从电路中移除 XDS100时、此程序也会出现同样的问题。 任何复位或下电上电操作均不会恢复该功能。 需要重新刷写。 我曾尝试在线路102上添加延迟(~1秒)、以查看这是否会对启动产生任何影响。 它没有。 该方案的内容:
//*****************************************************************************
//
// uart_echo.c - Example for reading data from and writing data to the UART in
// an interrupt driven fashion.
//
// Copyright (c) 2011-2014 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 2.1.0.12573 of the EK-LM4F232 Firmware Package.
//
//*****************************************************************************
#include <stdint.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include "inc/hw_types.h"
#include "inc/hw_memmap.h"
#include "inc/hw_gpio.h"
#include "inc/hw_ssi.h"
#include "inc/tm4c123gh6pm.h"
#include "driverlib/debug.h"
#include "driverlib/fpu.h"
#include "driverlib/ssi.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/adc.h"
#include "driverlib/timer.h"
#include "driverlib/rom.h"
#include "inc/hw_ints.h"
#include "driverlib/uart.h"
#include "utils/uart1_stdio.h"
//#include "grlib/grlib.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>UART Echo (uart_echo)</h1>
//!
//! This example application utilizes the UART to echo text. The first UART
//! (connected to the USB debug virtual serial port on the evaluation board)
//! will be configured in 115,200 baud, 8-n-1 mode. All characters received on
//! the UART are transmitted back to the UART.
//
//*****************************************************************************
#define UART_DEBUG 0
unsigned char Str[72];
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*****************************************************************************
//
// The UART interrupt handler.
//
//*****************************************************************************
void UARTIntHandler(void) {
uint32_t ui32Status;
ui32Status = ROM_UARTIntStatus(UART0_BASE, true);
ROM_UARTIntClear(UART0_BASE, ui32Status);
char c[] = ROM_UARTCharGetNonBlocking(UART0_BASE);
while(ROM_UARTCharsAvail(UART0_BASE)){}
UARTprintf(UART_DEBUG, "Received: %c\n", *c);
if (c[0] == 's') {UARTprintf(UART_DEBUG, " --> SAMPLE\n");}
}
//*****************************************************************************
//
// This example demonstrates how to send a string of data to the UART.
//
//*****************************************************************************
int
main(void)
{
ROM_FPULazyStackingEnable();
ROM_SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);
ROM_SysCtlDelay(22222222);
// Enable GPIOA
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
while(!ROM_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOA))
{
}
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
// Enable UART0
while(!ROM_SysCtlPeripheralReady(SYSCTL_PERIPH_UART0))
{
}
ROM_IntMasterEnable();
ROM_GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
ROM_UARTConfigSetExpClk(UART0_BASE, ROM_SysCtlClockGet(), 115200,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
//ROM_GPIOPadConfigSet(GPIO_PORTA_BASE, GPIO_PIN_0, GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD_WPU);
// ROM_GPIOPadConfigSet(GPIO_PORTA_BASE, GPIO_PIN_1, GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD_WPD);
IntRegister(INT_UART0, UARTIntHandler);
ROM_IntEnable(INT_UART0);
ROM_UARTIntEnable(UART0_BASE, UART_INT_RX | UART_INT_RT);
UARTprintf(UART_DEBUG, "Testing\n");
while(1)
{
}
}
总之,我曾尝试过:
*在保持串行连接的同时,我拔下 XDS100。 断开连接时、系统似乎停止运行。
*重新连接 XDS100不会恢复串行通信。
*在维护 XDS100的同时,我可以拔下 DB9上的串行电缆并重新连接该电缆,系统将继续运行。
*移除 XDS100、串行电缆和电源,然后按任何顺序重新连接它们(我已经全部尝试过)并不重要。 如果不重新刷写微控制器、系统将无法恢复。
*我在 PA0 (UART0Rx)上添加了一个10k 上拉电阻,这也没有什么区别。
遗憾的是、除了电源外、此主板没有 LED 指示灯、因此我无法确定系统在重置后是否正在运行。 我将向其中一个引脚添加一个 LED、使其每秒产生一次脉冲、以指示其正在运行。 这还将让我检查系统是否在未连接串行电缆的情况下重新闪存;现在我唯一的指示是串行输出。
对未来可能发生的情况以及我接下来要做什么有什么想法吗?
