主题中讨论的其他器件:CODECOMPOSER、 BQ79616、 BQ79600EVM、 ISO1050、TMS570LS1224
我知道 C2000控制器和 Codecoser Studio。
但现在我需要 在 Launch Pad XL2上处理 Hercules TMS570LS1224CPGE。
我尝试使用 UART 示例代码使 BQ79600EVM 与 BQ79616一起运行。
(TMS570通过菊花链与 UART RX/TX 与 BQ79600和 BQ79616进行通信)
请参阅设置: bq79600evm-sample-code-do-no-wakeing-to-bq79616-stack
因此、此示例代码不包括 CAN 总线 我"简单"想向现有代码中添加 CAN 总线功能、以便将电路板连接到 PC/光伏逆变器。
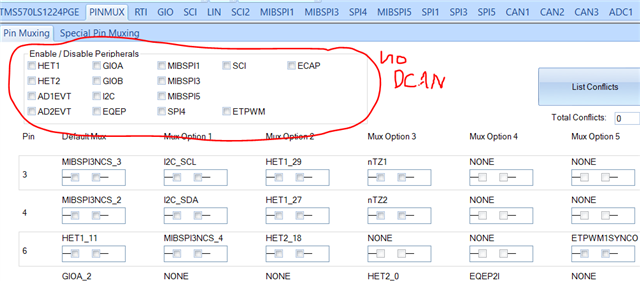
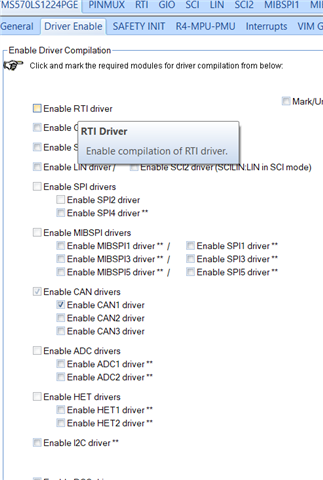
我安装了 HalCoGen 并且想要获得/学习这个 DCAN1 PinMux 和中断处理的配置。
但与其他控制器相比、这个故事似乎有点混乱。
我观看了:
https://www.youtube.com/watch?v=TrKQN-sor-s
也通过了
probing-your-Hercules-launchpad-can-bus-part-2
但一般而言、我不了解将物理引脚连接到 CAN1 RX 中断或 TX 发送线路的原则。
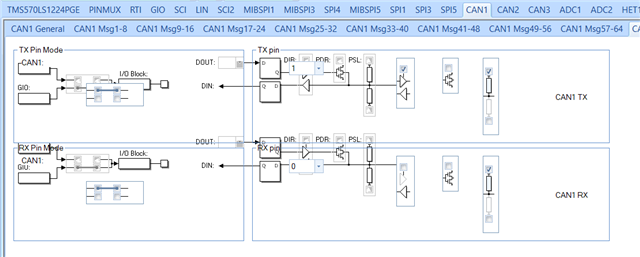
在哪里将物理引脚设置为 CAN1 TX TX?
赫丘利斯控制器的配置是否有更好的解释?
另一个混乱情况是 spns190b.pdf 第95页表6.32第7行。 它显示、DCAN 和 SPI5共享重新来源。
所以也许我必须在"PinMuxing"选项卡上添加 MIBSP5、并且神奇的 DCAN1也在工作? 但仍然没有物理引脚连接选项卡?...
是否有人可以帮助遵守原则或帮助进行配置?
任务是:使用 ISO1050 A 为现有代码添加 CAN 总线特性、并发送一些数据...