

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCU-PLUS-SDK-AM243X 您好!
我们目前在以太网-PHY DP83826和在 Profinet 应用中的启动行为方面存在问题。
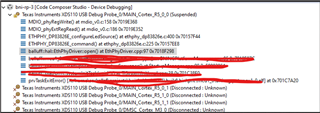
在一些电路中、可能会发生系统在启动时挂起的情况。 Call-Stack 如下所示:
经过调查并再次查看数据表后、我们支持以下内容:

T4定义为最大50ms、这意味着我们需要在复位版本之后等待这一次、以确保 Eth-PHY 完全引导。
下面是我对此的问题:
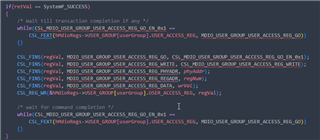
看来我们等待的时间不够长,而且很早就发出了命令。 这会使空穴系统进入无响应状态、它在上面的调用堆栈中只是空闲。
这个50ms 不应该在 PRU 级别得到处理吗? 至少我们应该在应用级别得到一个错误代码、指示"PRU 未就绪"或/和"EHTPHY 未就绪"等内容
我认为 ETH-PHY 的 RESET 引脚也由 PRU 驱动、因此应由 SDK 处理。
是否已经有功能可以检查 PRU 和 ETH-PHY 是否完全引导?
但至少我认为 ETH-PHY 驱动程序的"命令函数"应返回前面所述的错误代码。
谢谢
Fabian



{kind=link}