请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL2-TMS57012 主题中讨论的其他器件:HALCOGEN
工具与软件:
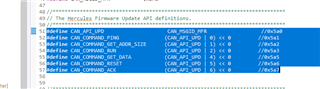
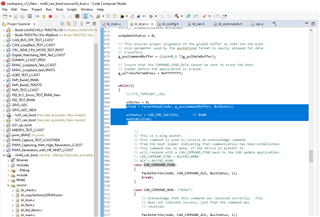
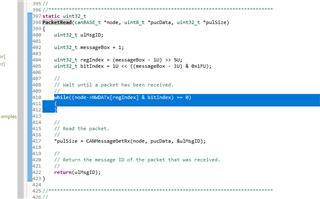
我正在浏览 TMS57012的 CAN 库、它看起来好像我没在下面一行:
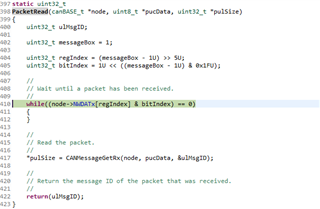
当我发送 CAN 数据包并在示波器以及我的 IXXAT 工具上进行检查时、没有错误、并且 TX 线路正在发送确认。 但在调试器中、代码似乎没有越过此行。
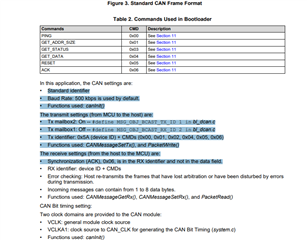
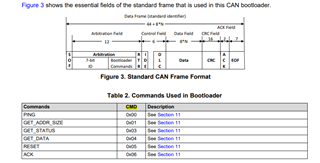
TMS570和 IXXAT 都设置为500kbit/s、数据包的 ID 为1、DLC 为8、而我要发送的数据是0x11 22 33 44 55 66 77 88。 发送数据包时是否丢失了任何东西?
所有这些代码均来自此处的示例 Project Hercules Safety MCU 6.3 Bootloader: 6.1.项目0—Hercules 安全 MCU 文档。