请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:RM57L843 工具与软件:
您好!
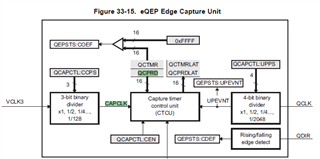
我正在尝试使用 eQEP 模块进行速度测量。 我已经通读了 RM57参考手册、特别是图33-15和33-17。 我有以下问题。
1.什么是差分方程67和68。 等式67中所示。 在等式67中、我们用单元位置事件之间的脉冲数除以单元位置事件之间经历的时间。 而在等式68中、我们用单位计时器事件之间的位置计数器增量值进行除法。
2.它还介绍了如何使用捕捉模块进行低速测量。 低速、中速和高速的标准是什么?
3.单元计时器和捕捉计时器的作用是什么?
任何帮助都将非常感谢。
谢谢!
Ravi