请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL2-RM46 主题中讨论的其他器件:HALCOGEN
工具与软件:
您好、专家
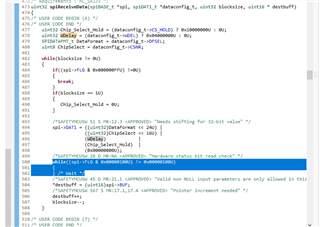
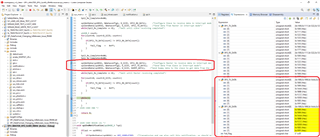
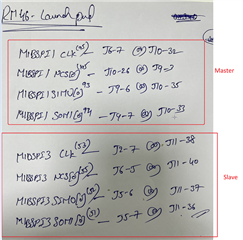
我正在尝试使用 SPI 使 SD 卡在 XL2-RM46 LaunchPad 上工作、到目前为止、我已经能够同时使用 SPI1和 SPI3运行 SPI 环回测试示例。 我能够使用 SPITransmitAndReceive 函数调用在同一 SPI 上发送的字节。 然而、当我在 HALCoGen 中将 SPI1配置为主器件、将 SPI3配置为从器件、在 SPI1上发送、然后在 SPI3上接收时、我只能读取0xFF。 我不知道我在这里遗漏了什么。 我已经尝试通过在 HALCoGen 中适当配置 SPI1和 SPI3作为主器件、将另一个用作从器件。 我认为 SPI1 CS 连接到 SPI3上的正确 CS 引脚。 我将随此帖子附加 HCG 文件。
奇怪的部分是、我能够探测和观察 SPI1 MOSI 和 SPI3 SIMO 引脚(在示波器上)上发送和接收的数据、但使用 spiReceiveData 读取 SPI3上的数据仍会向我提供0xFF。 我是否缺少其他一些配置?
HCG 文件链接: https://drive.google.com/file/d/1DBFMI_IWdv25ezCjZ4Xps28AMqoKYDnf/view?usp=drive_link
感谢你能抽出时间
此致
Karan