Other Parts Discussed in Thread: TMS570LC4357, HALCOGEN, DP83869HM, DP83640
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 主题中讨论的其他器件: HALCOGEN、 DP83869HM、DP83640、 DP83869
工具与软件:
HII、
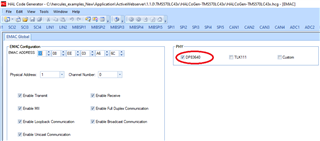
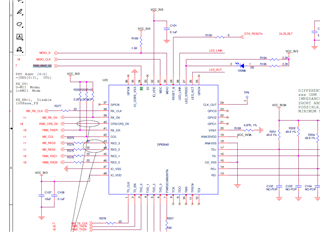
我正在使用 带以太网 phy dp83869hm 的 tms570lc4357、我无法 与 TMS 建立以太网连接、因为 halcogen 是83860的发电驱动程序、请建议解决方案







 它会中断12 - 15秒
它会中断12 - 15秒 




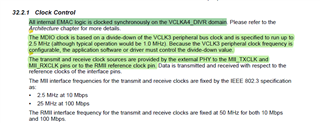


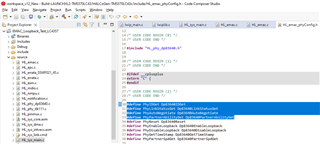
 我更改了 MDC 配置,也给出了静态 IP,结果相同的 dp83640也具有相同的时钟配置,
我更改了 MDC 配置,也给出了静态 IP,结果相同的 dp83640也具有相同的时钟配置, 
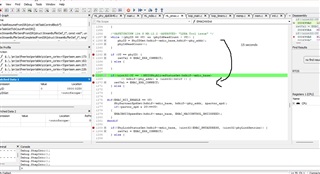
 此处、我们在 DHCP IP 期间卡住、
此处、我们在 DHCP IP 期间卡住、 

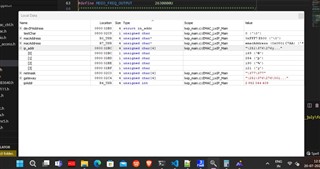 能够分配静态 IP 但无法 ping
能够分配静态 IP 但无法 ping