请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSPM0C1104 主题中讨论的其他器件:SysConfig
工具与软件:
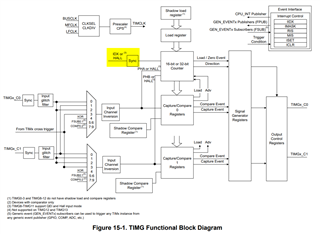
我希望从 BLDC 电机到 MSPM0的3个霍尔输入使用 QEI 中的硬件对电机位置进行计数。
第15.2.3.1.3章 QEI 模式似乎没有提供足够的答案。
我已经从 SDK 中读取了"timg_qei_mode"示例、但该示例只有两个输入、并且不显示如何读取位置。
工具与软件:
我希望从 BLDC 电机到 MSPM0的3个霍尔输入使用 QEI 中的硬件对电机位置进行计数。
第15.2.3.1.3章 QEI 模式似乎没有提供足够的答案。
我已经从 SDK 中读取了"timg_qei_mode"示例、但该示例只有两个输入、并且不显示如何读取位置。