

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-EM-CC2340R5 主题中讨论的其他器件:CC2340R5、 SysConfig
工具/软件:
大家好! 我相信有一种 更高效的方法来调试此问题、我很难找到它。
我遵循了以下 文档:调试—SimpleLink CC23xx SDK BLE5-Stack 用户指南3.02.04.00文档
CC23xx SDK BLE5-Stack 用户指南3.02.04.00文档
下面是到目前为止我所知道的内容:
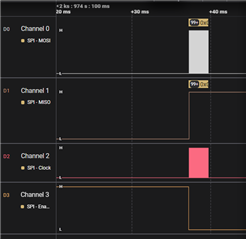
- SPI 传输成功且有效(健康的事务,我所期望的,数据也被成功读回) 
-始终如一,下一个 SPI 传输让我进入 ExceptionArmV6M.c 的 exception_handlerSpin。 与上图相同。
-看看任务,没有超过堆栈大小 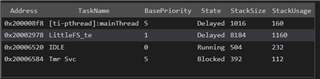
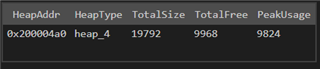
-堆似乎没问题
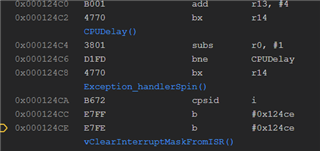
-看看 PC 程序计数器 0x000124CE,它指向这个 exception_handlerSpin,是有意义的
- xPSR 确认是,这是通过0x3的硬故障 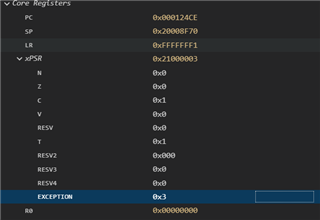
- MSP/SP 是相同的 0x20008F70值。 在反汇编中查看此地址不会使我产生任何成果。 附近/上面没有给我提示的函数。
-日志记录,我的代码基本上是,其中最后一个日志是在 spi_transfer 之后立即:
log (start SPI transfer) //this prints to log spi_transfer(stuff) //SPI trasnfer completes via Saleae reading log (end SPI transfer) //never prints
所以我不确定如何从这里进行调试... 查看 SPI 和 DMA 寄存器、
DMA ->错误:0x00000000
SPI0 ->原始中断状态:空闲和 TX 0x1
SPI0 -> STA:Rx FIFO 未满、它为空。 TX FIFO 未满、它为空
任何想法或智慧欣赏!



