请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC2745R10-Q1主题: SysConfig 中讨论的其他器件
工具/软件:
TI、您好
当 SPI 通信方法从轮询更改为 DMA 时、无法发送数据。
(环境)
软件产品:SimpleLink 低功耗 F3 SDK (8.30.00.11_ea)
板:CC2745R10-Q1 开发平台
在上述环境中、SPI 通信方法从轮询更改为 DMA。
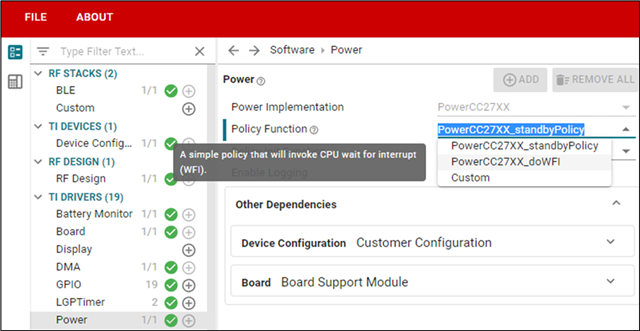
(更改 (SysConfig))
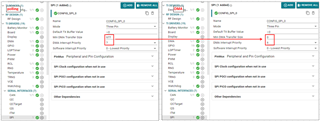
串行接口-> SPI ->
最小 DMA 传输大小:977→0
DMA 中断优先级:7→6
在进行上述更改和调试之后、
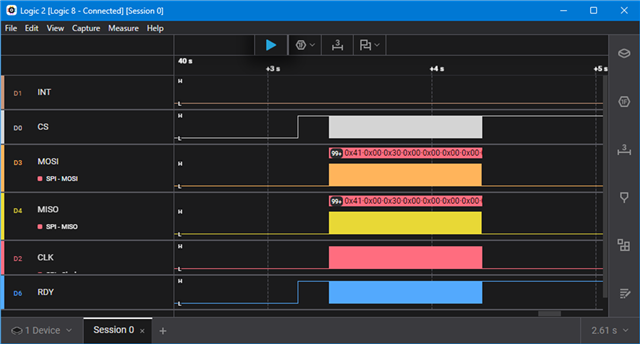
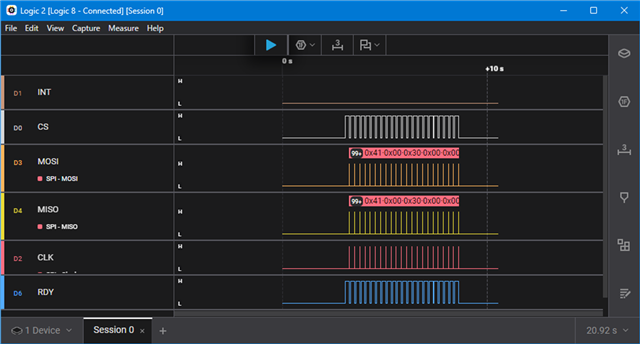
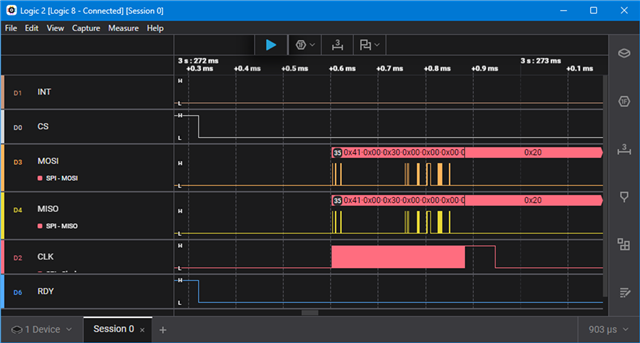
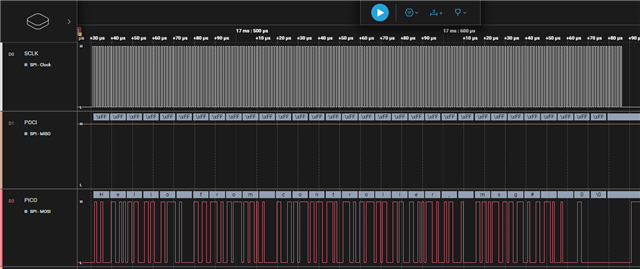
更改(轮询)之前:尝试发送 51 字节数据时、发送 51 字节数据。 (数据传输成功)
更改后 (DMA):尝试发送 51 字节数据时、会发送 35 字节的数据。 (数据传输失败)

为什么会这样呢?
此致、
Sho