1.使用 SDK simplelink_lowpower_f3_SDK_9_11_01_19
2.在 keynode 演示中,将其设置为作为中央节点连接到 carnode ,配对并加密,然后启动 CS_SecurityEnable。
3、使用汽车节点演示,将汽车节点的角色设置为 Reflector ,将关键节点设置为 Initor。
4. Carnode 接收到 CS_SECURITY_ENABLE_COMPLET_EVENT 事件后、将使用 CS_ReadRemoteSupportedCapabilities。
接收到 CS_READ_REMOTE_SUPPORTED_CAPABILITY_COMPLE_EVENT 事件后、Carnode 会设置 CS_SetDefaultSettings 和 CS_CreateConfig。
6.在 carnode 收到 CS_CONFIG_COMPLET_EVENT 事件后、它设置 CS_SetProcedureParameters 和 CS_ProcedureEnable。
7.此时 CS 测距可以运行。 范围结束后、我想使用原始参数直接调用 CS_ProcedureEnable 来开始下一个范围操作。 CS_ProcedureEnable 返回成功状态。
但是、CS_Procedure_enable_complete_event 事件返回 procEnableCompleteEvt.csStatus、这并不表示成功。 procEnableCompleteEvt.csStatus = 0x32 (RCL_CMD_BLE_CS_SUBEVENT_RESULT_CONTINUE_OPCODE)。
(如果我在每次执行 CS 一次后执行两个操作 CS_SetProcedureParameters + CS_ProcedureEnable、则 CS 将成功启动。)
问题:
1.为什么即使在上一轮 CS 范围完成后 CS 仍然无法启动、并且我成功调用 CS_ProcedureEnable、但 CS_Procedure_enable_complete_event 事件返回 procEnableCompleteEvt.csStatus = 0x32?
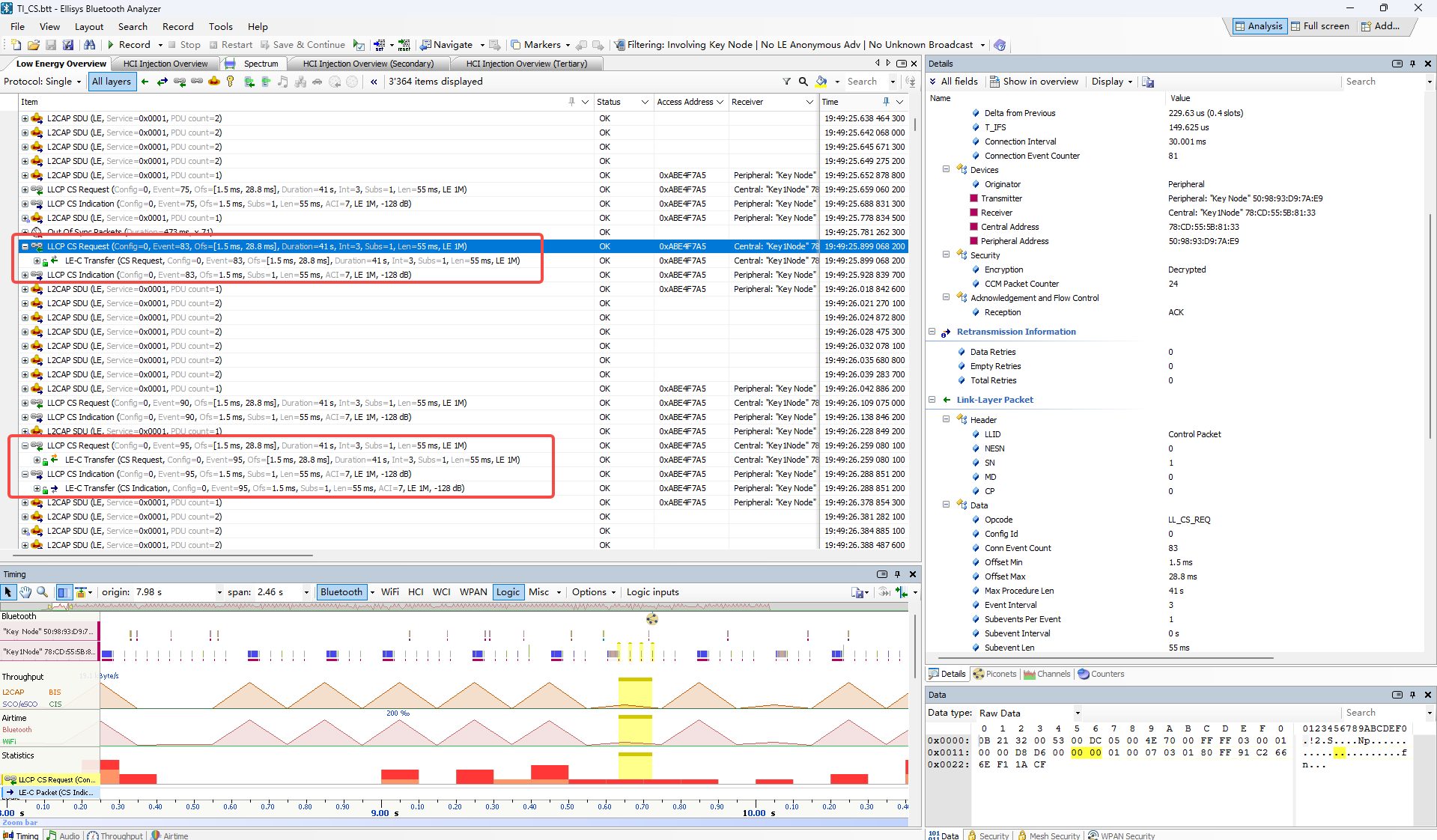
2.捕获监听器日志后、作为反射者的 Carnode 请求启动 CS 并发送 LL_CS_REQUEST。 关键节点充当电阻器、不向反射者返回 LLCP_CS_RESPONSE 数据包。 我相信这是一个问题。