请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: CC2745R10-Q1
您好、
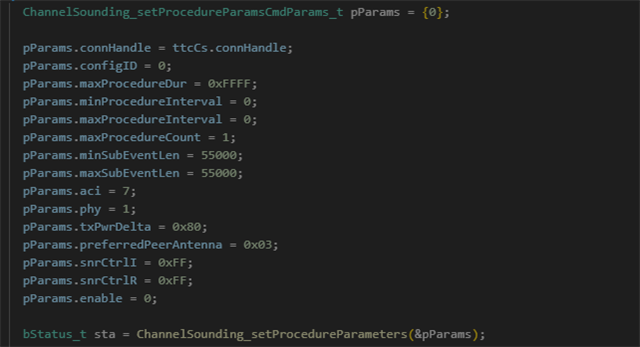
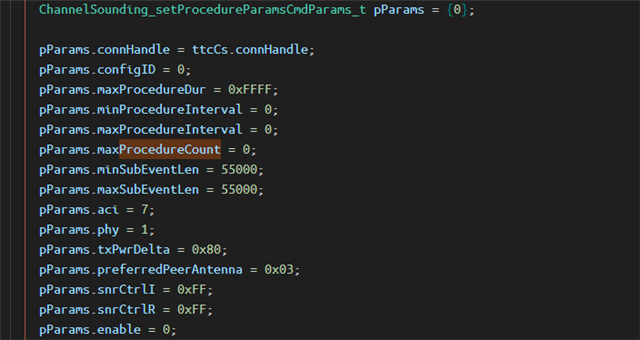
在 CS 测距期间、当距离超过 10 米时、系统很容易进入 Exception_handlerSpin 函数。 通过调试变量分析、我怀疑 RCL_Handler_BLE5_updateTxBuffers() 中的 nextTxBuffer 链接列表指针已损坏。
SDK:simplelink_lowpower_f3_SDK_9_14_02_16