请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:CC1352R 您好,
运行TI RTOS的CC1352偶尔会被现场看门狗重置。 我们必须有一个错误,它会锁定负责清除看门狗的任务。
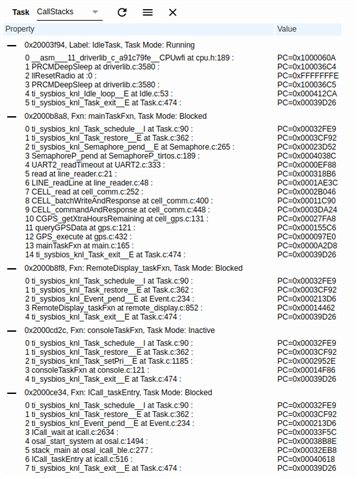
如果我们能够在实验室中重现此信息,我们可以通过JTAG连接并使用运行时对象查看器(ROV)来检查 调用栈中是否存在问题任务。
遗憾的是,我们很难重现此问题,因此我们希望在现场为我们的设备添加更多日志记录。
ROV使用什么数据来显示每个RTOS任务的调用栈? 从我们的应用程序访问此数据以便将其保存到外部闪存的最佳方式是什么?
看门狗到期时,看门狗驱动程序不存储任何数据。 您可以使用本文中的指导在复位时将数据存储在应急缓冲区中:
e2e.ti.com/.../198.2253万
不幸的是,这种联系已经死了。 您能否提供任何有关将数据存储在"应急缓冲区"(如 所述的帖子)中的说明?
谢谢!
彼得