

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-AOA
您好!
目前、我们有 BOOSTXL-AOA 和多个 CC26X2R1 DKS、simplelink_cc13x2_26x2_SDK_5_10_00_48 SDK。 我们获得了一个修补的 RTLS UI 软件、该软件不会因 UI 错误而崩溃。 具有默认设置的软件可以连接到主器件/CTE 接收器。 它可以与来自 CTE 发送器的周期性广播同步、并且可以接收 CT。 但是、结果(即角度)对于无连接模式以及连接导向模式来说都有点不可预测。 这种行为与我们的期望和演示不符: https://training.ti.com/tida-01632-automotive-bluetooth-low-energy-receiver-reference-design
在连接导向模式下、角度很少低于0度、不稳定、似乎未反映发送器和接收器之间的相对位置。
我们分析了原始数据、似乎采样工作正常。 使用与阵列不同的天线时、接收信号强度会显著下降、但这与 TI 文档中提供的说明相对应。
问题是的
a)我们的目标是否可通过 TI 解决方案实现? 也就是说、使用两个具有两根天线的无连接模式中的两个 CTE 器件来进行方向查找的角度计算非常可靠? 我们的方案应与 TIDA-01632完全匹配。
b)提供的算法(在 RTLS UI 或 SDK 中)是否能够在给定上述设置的情况下正确计算角度?
c) RTLS UI 是否完全支持无连接模式?
d) SDK 是否完全支持无连接模式?
e)如果我们让制造 TIDA-01632 PCB、此演示是否可以使用已有的 SDK? 是否可以获取 TIDA-01632视频中介绍的源?
应报告0度角时的原始数据示例:
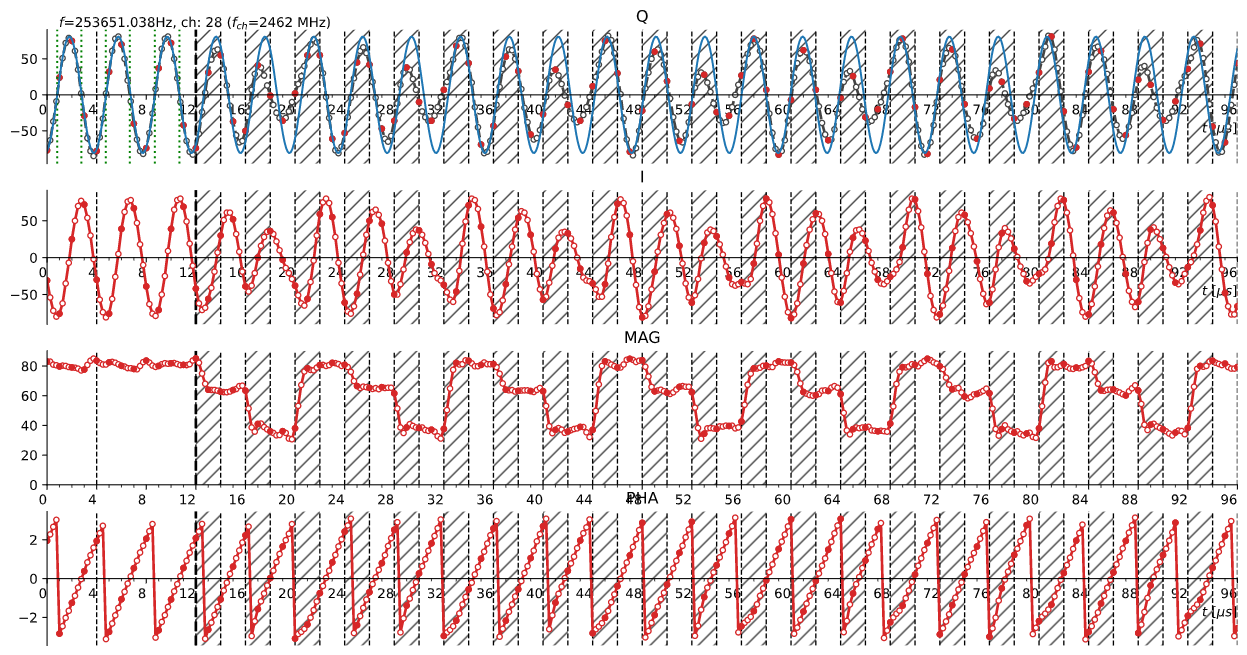
我们的目标是进入状态、其中 BOOSTXL-AOA 套件将使用2根天线进行角度检测、类似于 TIDA-01632
请看看测量结果、并考虑这是否是 SDK 算法的足够质量数据? 或者、您能否为我们提供有关结果的一般反馈? 我们能够测量更多案例等
该测试是在实验室进行的、节点之间的距离约为1.5m。
此致 Zdenek 和 Jan
