Other Parts Discussed in Thread: CC2650, AFE4490
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC2650 Thread 中讨论的其他器件:CC2650、 AFE4490
工具/软件:TI-RTOS
您好!
我一直在使用 CC2650 Launchpad、我遇到了一个问题、无法确定原因。
我使用 CC2650通过 SPI 协议与 AFE4490通信。 我创建了一个任务函数、在该函数中、我已初始化所有 SPI 参数、并写入运行 AFE4490所需的默认寄存器。
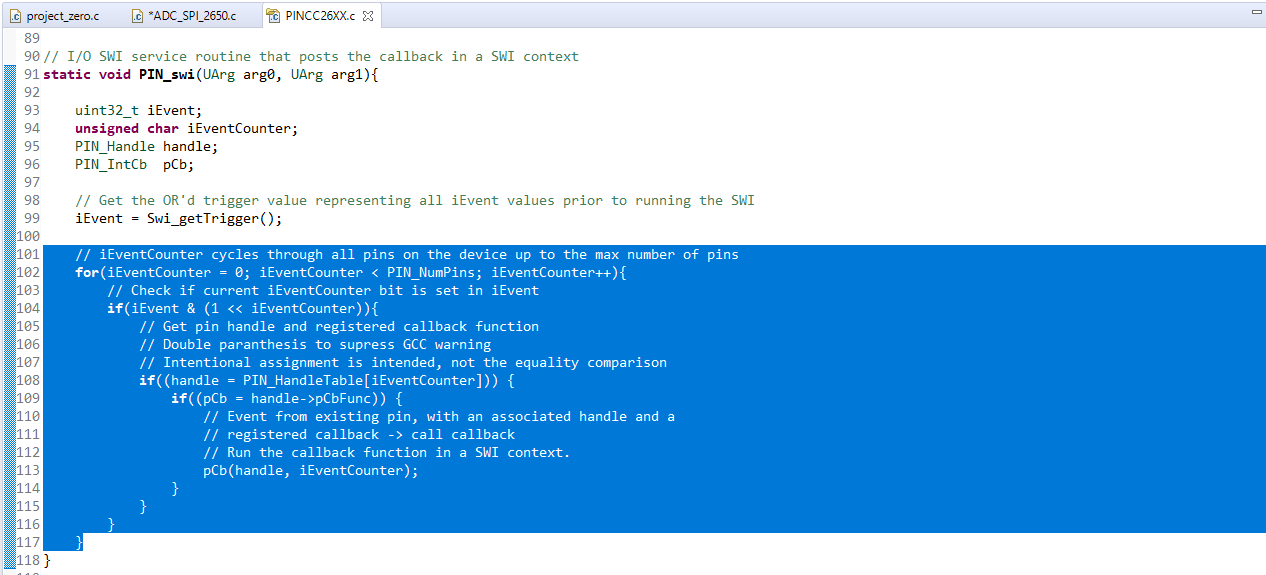
现在问题出现了、当我在 RDY 引脚上设置中断并 调用函数 afecallback 时。 在该函数中、我正在读取寄存器以获取 ADC 数据。 当我运行程序时、我没有遇到任何错误、但我无法获取任何数据。 因此、为了验证函数是否被调用、我使用了断点。 我将断点放置在 afecallback 函数中、程序完全到达那里、其中包括写入寄存器和启用寄存器的读取函数。 使用断点继续执行程序后、我看到断点卡在"for (for)"和"if (if)"循环内(如以蓝色突出显示的图像中所示)。 下面也是我的程序。 请尽快恢复。
/*
=== empty.c ======
*/
#include
#include
#include
/* XDCtools 头文件*/
#include
#include
/* BIOS 头文件*/
#include
#include
#include
#include
#include
/* TI-RTOS 头文件*/
#include
#include
#include
#include
/*板头文件*/
#include "Board.h"
#define TASKSTACKSIZE 1024
Task_Structure0Struct;
Char task0Stack[TASKSTACKSIZE];
/*变量*/
#define arraylength 2
#define DATA_LENGTH 6
uint8_t txBuf[arraylength*2];
uint8_t rxBuf[arraylength*2];
uint8_t transferok;
uint8_t I=0;
uint32_t adcreading[data_length];
uint8_t RxBuffer[1];
uint8_t flag_alt = 1;
uint8_t FLAG = 0;
/* SPI 驱动程序处理*/
静态 SPI_Handle spiHandle;
静态 SPI_Params spiParams;
static SPI_Transaction transaction;
//引脚驱动程序句柄*/
static PIN_Handle pinHandle;
静态 PIN_STATE PinState;
//引脚驱动程序处理*/
static PIN_Handle buttonPinHandle;
static PIN_Handle ledPinHandle;
// PIN_Config 表的全局存储器存储*/
static PIN_State buttonPinState;
static PIN_State ledPinState;
PIN_Config pinTable[]=
{
AFE_CS | PIN_GPIO_OUTP_EN | PIN_GPIO_HIGH | PIN_PushPull | PIN_DRVSTR_MAX、//CSn 引脚
AFE_PDN | PIN_GPIO_OUTP_EN | PIN_GPIO_HIGH | PIN_PushPull | PIN_DRVSTR_MAX、
AFE_RST | PIN_GPIO_OUTP_EN | PIN_GPIO_HIGH | PIN_PushPull | PIN_DRVSTR_MAX、
AFE_RDY | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_DIS、//PIN_IRQ_POedge、
PIN_TERMINATE
};
/*
应用 LED 引脚配置表:
*-所有 LED 板 LED 均关闭。
*/
PIN_Config ledPinTable[]={
BOARD_LED1 | PIN_GPIO_OUTP_EN | PIN_GPIO_LOW | PIN_PushPull | PIN_DRVSTR_MAX、
PIN_TERMINATE
};
/*
应用按钮引脚配置表:
*-按钮中断配置为在下降沿触发。
*/
PIN_Config buttonPinTable[]={
BOARD_BUTTON0 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE、
PIN_TERMINATE
};
//函数原型设计*/
带符号长 AFE4490_REG_READ (无符号字符 ReG_address);
void AFE4490_REG_WRITE (无符号字符 reg_address、uint32_t data);
void SPI_read (uint8_t REG_address、uint32_t*数据);
void AFE4490_InReg_it (void AFE4490_Init)
void read_enable (void);
void read_disable (void);
void afeCallbackFxn (PIN_Handle handle、PIN_ID pinId);
void UartApp_UartRxCB (UART_Handle handle、 void * buf、size_t count);
void enable_pin_interrupt ();
void disable_pin_interrupt ();
//void SPI_Int_Callback (SPI_Handle handle、 SPI_Transaction * objTransaction);
/*
===== buttonCallbackFxn ===
*引脚表中配置的引脚中断回调函数板按钮。
*如果定义了 Board_LED3和 Board_LED4、则我们会将它们添加到 PIN
*回调函数中。
//
void buttonCallbackFxn (PIN_Handle handle、PIN_ID pinId){
uint32_t currVal = 0;
/*去抖逻辑,仅在按钮仍被按下(低电平)时切换*/
CPUdelay (8000*50);
if (!PIN_getInputValue (pinId)){
/*根据按下的按钮切换 LED */
开关(pinId){
案例 Board_BUTTON0:
currVal = PIN_getOutputValue (Board_LED1);
PIN_setOutputValue (ledPinHandle、Board_LED1、!currVal);
ENABLE_PIN_INTERRUPT ();
中断;
默认值:
/*不执行任何操作*/
中断;
}
}
}/*
=== 心跳 Fxn ====
*切换 Board_LED1。 Task_sleep 由 arg0确定、而 arg0
*是为心跳任务实例配置的。
//
空 BEBEARBEARFxn (UARg arg0、UARg arg1)
{
spi_init();
//初始化 SPI 并指定非默认参数
SPI_Params_init (&spiParams);
spiParams.transferMode = SPI_MODE_BLOCKING;//SPI_MODE_CALLACK;//
spiParams.bitrate = 2000000;
spiParams.dataSize = 8;
spiParams.frameFormat = SPI_POL0_PHA0;
spiParams.mode = SPI_MASTER;
spiParams.transferCallbackFxn = SPI_Int_Callback;
//配置事务
transaction.count = sizeof (txBuf);
transaction.txBuf =(ptr) txBuf;
transaction.rxBuf =(ptr) rxBuf;
spiHandle = SPI_open (Board_SPI0、&spiParams);
PIN_setOutputValue (pinHandle、AFE_RST、1);
PIN_setOutputValue (pinHandle、AFE_PDN、1);
PIN_setOutputValue (pinHandle、AFE_RST、0);
PIN_setOutputValue (pinHandle、AFE_RST、1);
PIN_setOutputValue (pinHandle、AFE_CS、1);//将 CSn 设置为高电平
AFE4490_Reg_Init();
read_enable();
/*打开 TX LED *//
PIN_setOutputValue (ledPinHandle、Board_LED1、1);
}
/*
=== main ====
*/
int main (void)
{
Task_Params taskParams;
/*呼叫板初始化函数*/
Board_initGeneral();
Board_initSPI();
/*构造心跳任务线程*/
Task_Params_init (&taskParams);
taskParams.arg0 = 1000000 / Clock_tickPeriod;
taskParams.STACKSIZE = TASKSTACKSIZE;
taskParams.stack =_task0Stack;
Task_construct(&task0Struct,(Task_FuncPtr)心跳 BeatFxn、&taskParams、NULL);
/*打开 LED 引脚*/
ledPinHandle = PIN_OPEN (&ledPinState、ledPinTable);
if (!ledPinHandle){
System_abort ("初始化板 LED 引脚时出错");
}
buttonPinHandle = PIN_OPEN (buttonPinState、buttonPinTable);
if (!buttonPinHandle){
System_abort ("初始化按钮针脚时出错");
}
pinHandle = PIN_OPEN (&pinState、pinTable);
if (pinHandle == NULL){
while (1);//初始化在"pintable"中定义的引脚时出错
/*设置按钮引脚的回调*/
if (PIN_registerIntCb (buttonPinHandle、&buttonCallbackFxn)!= 0){
System_abort ("注册按钮回调函数时出错");
}
/* DRDY 引脚的设置回调*/
if (PIN_registerIntCb (pinHandle、&afeCallbackFxn)!= 0)
{
/*注册按钮回调函数时出错*/
while (1);
}
system_printf ("启动示例\n 系统提供程序设置为 SysMin。 "
"停止目标以查看 ROV 中的任何 SysMin 内容。\n");
/* SysMin 仅在您调用 flush 或 exit 时才会打印到控制台*/
system_flush();
/*启动 BIOS */
BIOS_start();
返回(0);
}/*
------------------------------------------------------- /*/* AFE
回调函数*/*
---------------------------------------- //
// void SPI_Int_Callback (SPI_Handle handle、SPI_Transaction * objTransaction)
//{
//
// adcreading[5]= AFE4490_REG_Read (0x2F);//LED1-ALED1差异
//
//}
void afeCallbackFxn (PIN_Handle handle、PIN_ID)
adcreading[0]= AFE4490_reg_read (0x2A);//LED2红色阶段
adcreading[1]=AFE4490_REG_READ (0x2B);//ALED2红色阶段
adcreading[2]=AFE4490_reg_read (0x2C);//LED1 IR 阶段
adcreading[3]=AFE4490_reg_read (0x2D);//ALED1 IR 阶段
adcreading[4]=AFE4490_reg_read (0x2E);//LED2-ALED2差异
adcreading[5]=AFE4490_REG_READ (0x2F);//LED1-ALED1差异
}
/*------------------------------------------------------- /*
SPI 寄存器写入函数*/
/*-------------------------------------------- */
void AFE4490_reg_write (unsigned char reg_address、uint32_t data)
{
txBuf[0]=((uint32_t) reg_address);
txBuf[1]=数据>>16;
txBuf[2]= data>>8;
txBuf[3]=数据;
rxBuf[0]= 0;
rxBuf[1]= 0;
rxBuf[2]= 0;
rxBuf[3]= 0;
PIN_setOutputValue (pinHandle、AFE_CS、0);//将 CSn 设置为低电平
SPI_transfer (spiHandle、&transaction);
PIN_setOutputValue (pinHandle、AFE_CS、1);//将 CSn 设置为高
电平}
/*------------------------------------------------------- */
/* SPI 读取函数*/
/*--------------------------------------------- */
void SPI_read (uint8_t reg_address、uint32_t* data)
{
txBuf[0]=((uint32_t) reg_address);
txBuf[1]= 0;
txBuf[2]= 0;
txBuf[3]= 0;
rxBuf[0]= 0;
rxBuf[1]= 0;
rxBuf[2]= 0;
rxBuf[3]= 0;
/*启动 SPI 传输*/
PIN_setOutputValue (pinHandle、AFE_CS、0);//将 CSn 设置为低电平
transferok = spi_transfer (spiHandle、&transaction);
PIN_setOutputValue (pinHandle、AFE_CS、1);//将 CSn 设置为高电平
if (转让)
{
*data =(rxBuf[1]<<16)|(rxBuf[2]<8)|(rxBuf[3]);
}
其他
{
*data = 0;//data 无效
}
}/*
------------------------------------------------ /*
AFE4490寄存器读取函数*/
/*------------------------------------------------ */
signed long AFE4490_reg_read (unsigned char Reg_address)
{
uint32_t configData;
unsigned long RetVal;
SPI_read (ReG_address、&configData);
RetVal = configData;
返回值;
}/*
------------------------------------------------------- /*
AFE4420 SPI 读取启用和禁用函数*/*
---------------------------------------------------- */
void read_enable (void)
{
TxBuf[0]= 0x00;
txBuf[1]= 0x00;
TxBuf[2]= 0x00;
txBuf[3]= 0x01;
PIN_setOutputValue (pinHandle、AFE_CS、0);//将 CSn 设置为低电平
SPI_transfer (spiHandle、&transaction);
PIN_setOutputValue (pinHandle、AFE_CS、1);//将 CSn 设置为高
电平}
void read_disable (void)
{
TxBuf[0]= 0x00;
txBuf[1]= 0x00;
TxBuf[2]= 0x00;
txBuf[3]= 0x00;
PIN_setOutputValue (pinHandle、AFE_CS、0);//将 CSn 设置为低电平
SPI_transfer (spiHandle、&transaction);
PIN_setOutputValue (pinHandle、AFE_CS、1);//将 CSn 设置为高
电平}
/*------------------------------------------------------- /*
AFE4420寄存器初始化函数*/
/*------------------------------------------------ */
void AFE4490_Reg_Init (void)
{
AFE4490_REG_WRITE (0x01、0x003AE8);
AFE4490_REG_WRITE (0x02、0x003CEE);
AFE4490_REG_WRITE (0x03、0x003A98);
AFE4490_REG_WRITE (0x04、0x004E1F);
AFE4490_REG_WRITE (0x05、0x000050);
AFE4490_REG_WRITE (0x06、0x000256);
AFE4490_REG_WRITE (0x07、0x0013D8);
AFE4490_REG_WRITE (0x08、0x0015DE);
AFE4490_REG_WRITE (0x09、0x001388);
AFE4490_REG_WRITE (0x0A、0x0015DF);
AFE4490_REG_WRITE (0x0B、0x002760);
AFE4490_REG_WRITE (0x0C、0x002966);
AFE4490_REG_WRITE (0x0D、0x000006);
AFE4490_REG_WRITE (0x0E、0x001387);
AFE4490_REG_WRITE (0x0F、0x00138E);
AFE4490_REG_WRITE (0x10、0x00270F);
AFE4490_REG_WRITE (0x11、0x002716);
AFE4490_REG_WRITE (0x12、0x003A97);
AFE4490_REG_WRITE (0x13、0x003A9E);
AFE4490_REG_WRITE (0x14、0x004E1F);
AFE4490_REG_WRITE (0x15、0x000000);
AFE4490_REG_WRITE (0x16、0x000005);
AFE4490_REG_WRITE (0x17、0x001388);
AFE4490_REG_WRITE (0x18、0x00138D);
AFE4490_REG_WRITE (0x19、0x002710);
AFE4490_REG_WRITE (0x1A、0x002715);
AFE4490_REG_WRITE (0x1B、0x003A98);
AFE4490_REG_WRITE (0x1C、0x003A9D);
AFE4490_REG_WRITE (0x1D、0x004E1F);
AFE4490_REG_WRITE (0x1E、0x000102);
AFE4490_REG_WRITE (0x1F、0x000000);
AFE4490_REG_WRITE (0x20、0x000000);
AFE4490_REG_WRITE (0x21、0x000000);
AFE4490_REG_WRITE (0x22、0x01FFFF);
AFE4490_REG_WRITE (0x23、0x020100);
AFE4490_REG_WRITE (0x24、0x000000);
AFE4490_REG_WRITE (0x25、0x000000);
AFE4490_REG_WRITE (0x26、0x000000);
AFE4490_REG_WRITE (0x27、0x000000);
AFE4490_REG_WRITE (0x28、0x000000);
AFE4490_REG_WRITE (0x29、0x000000);
AFE4490_REG_WRITE (0x2A、0x000000);
AFE4490_REG_WRITE (0x2B、0x000000);
AFE4490_REG_WRITE (0x2C、0x000000);
AFE4490_REG_WRITE (0x2D、0x000000);
AFE4490_REG_WRITE (0x2E、0x000000);
AFE4490_REG_WRITE (0x2F、0x000000);
AFE4490_REG_WRITE (0x30、0x000000);
}
void enable_pine_interrupt ()
{
PIN_setInterrupt (pinHandle、AFE_RDY | PIN_IRQ_POedge);
}
void disable_pin_interrupt ()
{
PIN_setInterrupt (pinHandle、AFE_RDY | PIN_IRQ_DIS);
}