请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC1312R1 工具与软件:
您好!
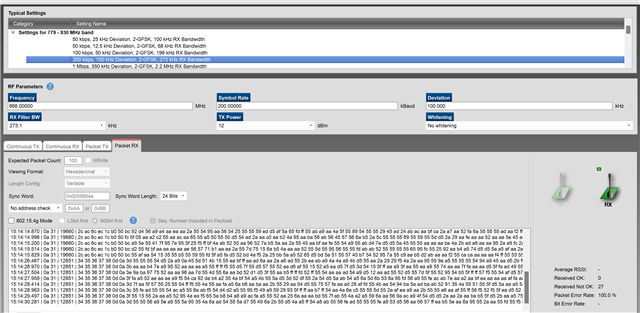
我正在开发 rfUARTBridge 演示 SDK 7_41_00_17 消息流 LAUNCHXL-CC1312R1 . 会自动重置 50kbps、25kHz 偏差、2-GFSK、100kHz RX 带宽 工作正常。 但是此配置的速率不能满足我的需求、因此我需要更改为 200kbps、100kHz 偏差、2-GFSK、273kHz RX 带宽。 修改后、接收器只能接收数据一次并看到红灯亮起、串行端口打印接收到的数据。 当发送端再次发射时、接收端不做出反应。
下面是我的一些参数:
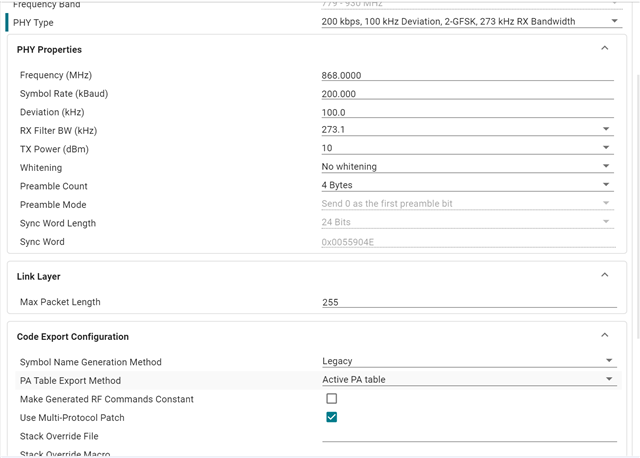
和 rfUARTBridge.syscfg
/**
* These arguments were used when this file was generated. They will be automatically applied on subsequent loads
* via the GUI or CLI. Run CLI with '--help' for additional information on how to override these arguments.
* @cliArgs --board "/ti/boards/CC1312R1_LAUNCHXL" --rtos "tirtos7" --product "simplelink_cc13xx_cc26xx_sdk@7.41.00.17"
* @versions {"tool":"1.20.0+3587"}
*/
/**
* Import the modules used in this configuration.
*/
const CCFG = scripting.addModule("/ti/devices/CCFG");
const custom = scripting.addModule("/ti/devices/radioconfig/custom");
const rfdesign = scripting.addModule("/ti/devices/radioconfig/rfdesign");
const GPIO = scripting.addModule("/ti/drivers/GPIO");
const GPIO1 = GPIO.addInstance();
const GPIO2 = GPIO.addInstance();
const RF = scripting.addModule("/ti/drivers/RF");
const UART2 = scripting.addModule("/ti/drivers/UART2");
const UART21 = UART2.addInstance();
const Settings = scripting.addModule("/ti/posix/tirtos/Settings");
const BIOS = scripting.addModule("/ti/sysbios/BIOS");
const Event = scripting.addModule("/ti/sysbios/knl/Event");
const Idle = scripting.addModule("/ti/sysbios/knl/Idle", {}, false);
const Idle2 = Idle.addInstance();
const Mailbox = scripting.addModule("/ti/sysbios/knl/Mailbox");
const Error = scripting.addModule("/ti/sysbios/runtime/Error");
const SysCallback = scripting.addModule("/ti/sysbios/runtime/SysCallback");
const Timestamp = scripting.addModule("/ti/sysbios/runtime/Timestamp");
/**
* Write custom configuration values to the imported modules.
*/
CCFG.enableBootloader = true;
CCFG.dioBootloaderBackdoor = 13;
CCFG.levelBootloaderBackdoor = "Active low";
CCFG.ccfgTemplate.$name = "ti_devices_CCFG_CCFGCC26XXTemplate0";
custom.prop8 = ["custom868"];
custom.radioConfigcustom868.carrierFrequency = 868.0000;
custom.radioConfigcustom868.txPower = "10";
custom.radioConfigcustom868.$name = "RF_Custom_Setting";
custom.radioConfigcustom868.phyType868 = "2gfsk200kbps100dev868";
custom.radioConfigcustom868.whitening = "No whitening";
custom.radioConfigcustom868.packetLengthRx = 255;
custom.radioConfigcustom868.codeExportConfig.$name = "ti_devices_radioconfig_code_export_param0";
custom.radioConfigcustom868.codeExportConfig.useMulti = true;
custom.radioConfigcustom868.codeExportConfig.symGenMethod = "Legacy";
custom.radioConfigcustom868.codeExportConfig.cmdList_prop = ["cmdFs","cmdPropRadioDivSetup","cmdPropRx","cmdPropTx"];
GPIO1.$hardware = system.deviceData.board.components.LED_RED;
GPIO1.$name = "CONFIG_GPIO_RLED";
GPIO2.$hardware = system.deviceData.board.components.LED_GREEN;
GPIO2.$name = "CONFIG_GPIO_GLED";
UART21.$name = "CONFIG_UART2_0";
UART21.$hardware = system.deviceData.board.components.XDS110UART;
UART21.txPinInstance.$name = "CONFIG_PIN_UART_TX";
UART21.rxPinInstance.$name = "CONFIG_PIN_UART_RX";
BIOS.assertsEnabled = false;
BIOS.heapBaseAddr = "__primary_heap_start__";
BIOS.heapEndAddr = "__primary_heap_end__";
const Clock = scripting.addModule("/ti/sysbios/knl/Clock", {}, false);
Clock.tickPeriod = 10;
const Timer = scripting.addModule("/ti/sysbios/family/arm/cc26xx/Timer", {}, false);
Idle2.$name = "powerIdle";
Idle2.idleFxn = "Power_idleFunc";
const Semaphore = scripting.addModule("/ti/sysbios/knl/Semaphore", {}, false);
Semaphore.supportsPriority = false;
const Swi = scripting.addModule("/ti/sysbios/knl/Swi", {}, false);
Swi.numPriorities = 6;
const Task = scripting.addModule("/ti/sysbios/knl/Task", {}, false);
Task.checkStackFlag = false;
Task.defaultStackSize = 512;
Task.idleTaskStackSize = 512;
Task.numPriorities = 6;
Error.policy = "Error_SPIN";
Error.printDetails = false;
const System = scripting.addModule("/ti/sysbios/runtime/System", {}, false);
System.abortFxn = "System_abortSpin";
System.exitFxn = "System_exitSpin";
System.extendedFormats = "%f";
System.supportModule = "SysCallback";
/**
* Pinmux solution for unlocked pins/peripherals. This ensures that minor changes to the automatic solver in a future
* version of the tool will not impact the pinmux you originally saw. These lines can be completely deleted in order to
* re-solve from scratch.
*/
GPIO1.gpioPin.$suggestSolution = "boosterpack.39";
GPIO2.gpioPin.$suggestSolution = "boosterpack.40";
UART21.uart.$suggestSolution = "UART0";
UART21.uart.txPin.$suggestSolution = "boosterpack.4";
UART21.uart.rxPin.$suggestSolution = "boosterpack.3";
Timer.rtc.$suggestSolution = "RTC0";