Other Parts Discussed in Thread: LVSERVOMTR
“线程: DRV8301-69M-Kit”中讨论的其它部件
您好,
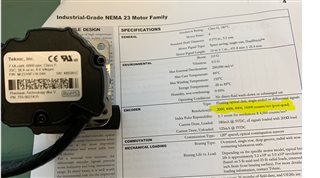
我获得 了 DRV8301-69M-Kit 和 LVSERVOMTR 电机(已验证为 Teknic_M2310PLN04K)。
我重新执行了实验1b 和5e,以确保电线连接和系统正常运行。
我的连接是:Teknic T (白色)连接到 DRV8301-69M-Kit 上的 A,Teknic R (黑色)连接到 DRV8301-69M-Kit 上的 B,Teknic S (红色)连接到 DRV8301-69M-Kit 上的 C。
都很好。我可以旋转马达并调整速度。
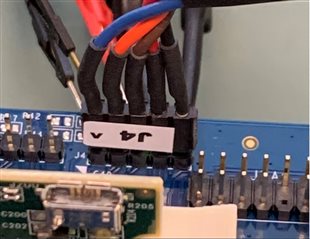
然后,我通过将 Teknic 电缆的 J4连接到 DRV8301-69M-Kit J4终端来恢复实验12a,请参见下图。

我的用户.h 的一些快照:

我在这款电机上运行60V,我认为这款电机在实验1b 和5e 上运行正常。
#define user_IQ_full;scale;voltage;V (60.0)
#define user_IQ_full;scale;current_a (41.25)
#define user_system_FREQ_MHz (90.0)
#define user_PWM_FREQ_kHz (10.0)
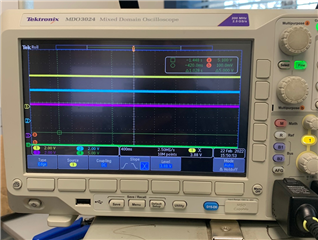
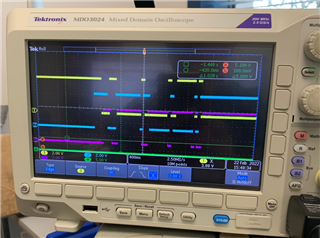
当我调节到非零速度时,电机不运行。
实验室电源电流跳至0.65A,电动机停转。
我不知道到底发生了什么。
我 在 InstacMotion 控件中使用定制马达运行 DRV8301-69M-Kit,一切都很顺利。
我购买了一套新 的 DRV8301-69M-Kit 和 LVSERVOMTR 电机 用于功率计目的,并想查看运动控制,但它不起作用。
我现在不知道。
您能照亮一些灯光吗?
此致,
亨利