


线程中讨论的其他部件:LDC1000EVM, LDC1614, LDC1101, LDC3114
大家好,
直到最近,我还在使用 LDC1000EVM评估模块中的传感器。 我从 EVM上扣下了USB模块,并将不同的终端单独连接到我的微控制器。
下面是我为读取传感器的接近寄存器而编写的代码。 我的方法如下:
*我使用适当的寄存器值设置传感器
*然后,我通过使用无限循环来轮询接近寄存器
// Included Files
#define DLY 21
#include "preprocessor.h"
#include "F28x_Project.h"
#include "spi_globals.h"
#include "spi_defines.h"
#include "function_defs.h"
void scan_test(void);
void main(void)
{
// INITIALISATION
//
// SETUP CLOCK FREQUENCY
EALLOW;
// ClkCfgRegs.LOSPCP.bit.LSPCLKDIV = 0b100;
EDIS;
// SETUP CODE
//
// PRELIMINARY STEPS
InitSysCtrl(); // Step 1. Initialize System Control:
InitSpiaGpio(); // Step 2. Initialize GPIO:
// InitSpibGpio(); // SPIB initialisation
DINT; // Step 3. Clear all interrupts:
InitPieCtrl(); // Initialize PIE control registers to their default state.
// Disable CPU __interrupts and clear all CPU __interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt Service Routines (ISR).
InitPieVectTable();
// Step 4. Initialize the Device Peripherals:
spi_fifo_init(); // Initialize the Spi FIFO
spi_init(); // init SPI
// GPIO initialisation:
#if 0
EALLOW;
GpioCtrlRegs.GPBDIR.bit.GPIO61 = 1; // This is to explicitly control chip select
EDIS;
#endif
// COMMAND SECTION
//
// WRITE COMMANDS
//
#if 1
// WRITE COMMANDS
// 2. rp max
write_command(ADR.Rp_MAX, 0x0E);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 3. rp min
write_command(ADR.Rp_MIN, 0x3A);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 4. sensor frequency
write_command(ADR.SEN_FREQ, 0x94);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 5. ldc config
write_command(ADR.LDC_CONF, 0x17);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 6. clk config
write_command(ADR.CLK_CFG, 0x02);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 7. comparator threshold high lsb
write_command(ADR.HI_LSB_CMP_LIM, 0x50);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 8. comparator threshold high msb
write_command(ADR.HI_MSB_CMP_LIM, 0x14);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 9. comparator threshold low lsb
write_command(ADR.LO_LSB_CMP_LIM, 0xC0);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 10. comparator threshold low lsb
write_command(ADR.LO_MSB_CMP_LIM, 0x12);
rxdat = store(); //read data into rxdat to clear INT_FLAG
// 11. intb pin configuration
write_command(ADR.INTB_CFG, 0x04);
rxdat = store(); //read data into rxdat to clear INT_FLAG
//12. Power config
write_command(ADR.PWR_CFG, 0x01);
rxdat = store(); //read data into rxdat to clear INT_FLAG
#endif
#if 1
// READ COMMANDS
//
read(0x00); // Read device id: address 0x00
device_id = store(); // Write data into variable to clear int_flag
read(0x01); // Read Rp max: address 0x01
rp_max = store(); // Write data into variable to clear int_flag
read(0x02); // Read Rp_min: address 0x02
rp_min = store(); // Write data into variable to clear int_flag
read(0x03); // Read Sensor frequency: address 0x03
sen_freq = store(); // Write data into variable to clear int_flag
read(0x04); // Read LDC configuration: address 0x04
ldc_cfg = store(); // Write data into variable to clear int_flag
read(0x05); // Read clock configuration: address 0x05
clk_cfg = store(); // Write data into variable to clear int_flag
read(0x06); // Read comparator threshold high LSB: address 0x06
lim_hi_lsb = store(); // Write data into variable to clear int_flag
read(0x07); // Read comparator threshold high MSB: address 0x07
lim_hi_msb = store(); // Write data into variable to clear int_flag
read(0x08); // Read comparator threshold low LSB: address 0x08
lim_lo_lsb = store(); // Write data into variable to clear int_flag
read(0x09); // Read comparator threshold low MSB: address 0x09
lim_lo_lsb = store(); // Write data into variable to clear int_flag
read(0x0A); // Read INTB Pin configuration: address 0x0A
intb_cfg = store(); // Write data into variable to clear int_flag
read(0x0B); // Read Power configuration: address 0x0B
pwr_cfg = store(); // Write data into variable to clear int_flag
read(0x20); // Read status: address 0x20
status = store(); // Write data into variable to clear int_flag
// Test loop
//
for(;;) // TEST LOOP
{
read(0x21); // Read lsb proximity data: address 0x21
proxdat_lsb = store(); // Write data into variable to clear int_flag
read(0x22); // Read msb proximity data: address 0x22
proxdat_msb = store(); // Write data into variable to clear int_flag
data = proxdat_msb<<8 | proxdat_lsb;
DELAY_US(100);
}
#endif
}
// FUNCTION DEFINITIONS:
//
void write_command(Uint16 wcom, Uint16 wdat)
{
SpiaRegs.SPITXBUF = wcom<<8 | wdat; // Concatenating command field and data field to transmit signal
while(SpiaRegs.SPISTS.bit.BUFFULL_FLAG !=0){} // Read only: set to 0 when tx'd data loaded into SPIDAT
while(SpiaRegs.SPISTS.bit.INT_FLAG !=1){} // Set to indicate SPI completed tx or rx
}
void read(Uint16 adr)
{
adr = adr + 0x80;
SpiaRegs.SPITXBUF = adr<<8 |0x00; // Read command to transmit
while(SpiaRegs.SPISTS.bit.BUFFULL_FLAG !=0){} // Read only: set to 0 when tx'd data loaded into SPIDAT
while(SpiaRegs.SPISTS.bit.INT_FLAG !=1){} // Set to indicate SPI completed tx or rx
}
Uint16 store(void)
{
rxdat = SpiaRegs.SPIRXBUF; // Store data in dummy variable rxdat
return rxdat; // Return value of stored data in variable
// Now by 'variable = store()' you can read data into variable
// Used for read commands
}
随附的是我正在使用的传感器的数据表:
e2e.ti.com/.../ldc1000_2D00_q1.pdf
LDC1000EVM模块的行为
在我的LDC1000EVM模块上,使用上述代码读取接近传感器。 接近寄存器中的数据对接近的导体作出响应,值相应增加和减少。
MIKROE LDC1000咔嗒板的行为
损坏以前的传感器后,我更换了MIKROE LDC1000咔嗒板。 运行相同的代码时,我发现以下行为:
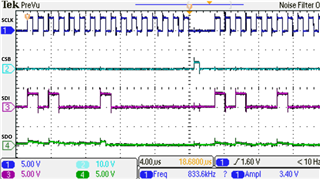
当我最初运行代码时,我可以读取接近寄存器以外的所有寄存器。 接近寄存器始终返回0x00。 注:所有其它寄存器都被正确写入和读取。 这是尝试读取接近寄存器的屏幕截图:
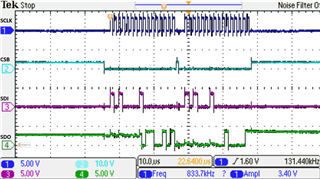
当我重新运行相同的代码时,我会从接近寄存器中读取数据,但是这次数据不会随着设备暴露在导体中而改变。 实际上,寄存器保持在相同的值-此值为0x2165。
我不知道为什么我会遇到这个问题。 以前,通过EVM板芯片,我获得了适当的读数。 我们在覆盆子PI板上运行此程序,我们再次获得了正确的值。 但是,当从TI主板运行该程序时,我得到了本文中概述的问题。
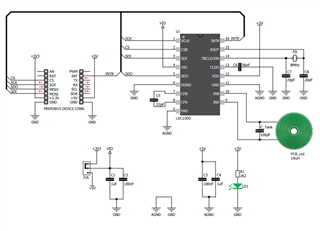
我可以看到两者之间的唯一区别是MIKROE点击板上的一个8 MHz振荡器晶体。 下面是LDC1000 MIKROE点击板的示意图:
另一个要提及的要点:
*在MIKROE触控板上,探测LC储罐线圈,我可以看到将导体靠近传感器的反应。 更改LDC1000传感器上的rp_min和rp_max寄存器也会影响此情况。 当接近寄存器返回零时,会观察到这种现象。
提前感谢
