请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 主题中讨论的其他器件:LAUNCHXL-F280025C、 BOOSTXL-DRV8323RS
您好、Yanming:
硬件: F280025C +8323RS、电机处于空载状态、C9 C10 C11为47nF。
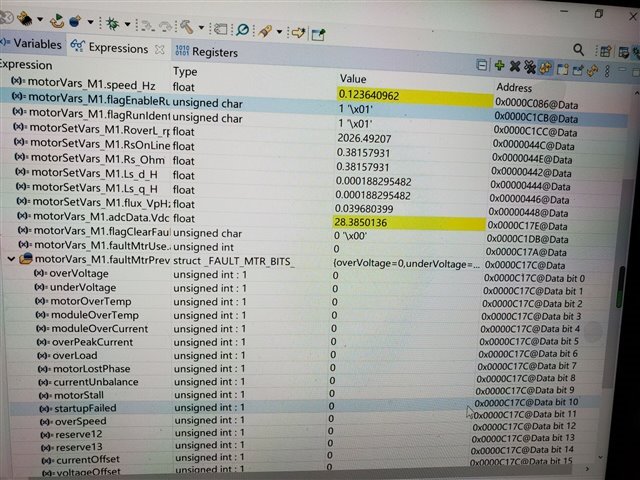
当客户基于上述硬件测试 DMC_LEVEL_4时、模块过流= 1且标志 EnableRunAndIdentify= 0、模块过流= 1将不会出现、直到电机被移除。 它可以在 F28027f+8353RS 之前运行。

此致、
绿色