请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28388D 你(们)好
我正在使用28388D 进行开发。
CAN-FD 是一种必要的功能、正在实施中。
TX 正在轮询、RX 是中断。
因此、我在 C2000中搜索了 V304和 V400的相关示例、并尝试运行它们。
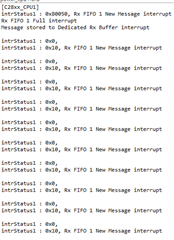
在 V304的 mCAN_ex_2_external_loopback _receive 示例中、确认中断仅在接收到数据时执行一次。
所提供的示例确实只有一个时间接收中断吗?
我有什么问题吗?
并且、当一个错误中断发生时、除了清除它之外、还有其他操作吗?