请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 下面有两个问题;
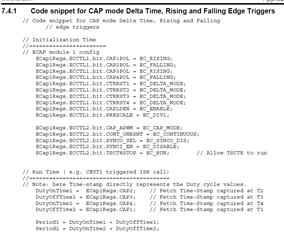
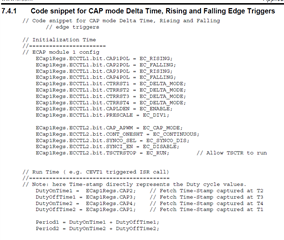
- 当在具有相同时钟(100MHz)的另一个控制器上使用 ECAP 模块捕获一个控制器的 PWM 时、我们将获得 PWM 频率实际值大约100Hz 的差异、并使用 ECAP 捕获一个控制器。
我们使用的是增量 ECAP、在上升沿和下降沿触发、以捕获 PWM 频率和占空比。
您能否帮助我们了解为什么我们在 ECAP 上获得100Hz 差异的频率值?
- 我们需要捕获一个控制器上的 PWM 生成与另一个控制器上的 ECAP ISR 之间的时间差。 除了使用 GPIO 引脚之外、您是否建议任何快速解决方案来测量两个不同控制器上事件之间的时间差?