Other Parts Discussed in Thread: DRV8353, UCC27714, MOTORWARE, DRV8312, DRV8302, TMS320F28069
主题中讨论的其他器件:DRV8353、 UCC27714、 MOTORWARE、 DRV8312、 DRV8302、 TMS320F28069
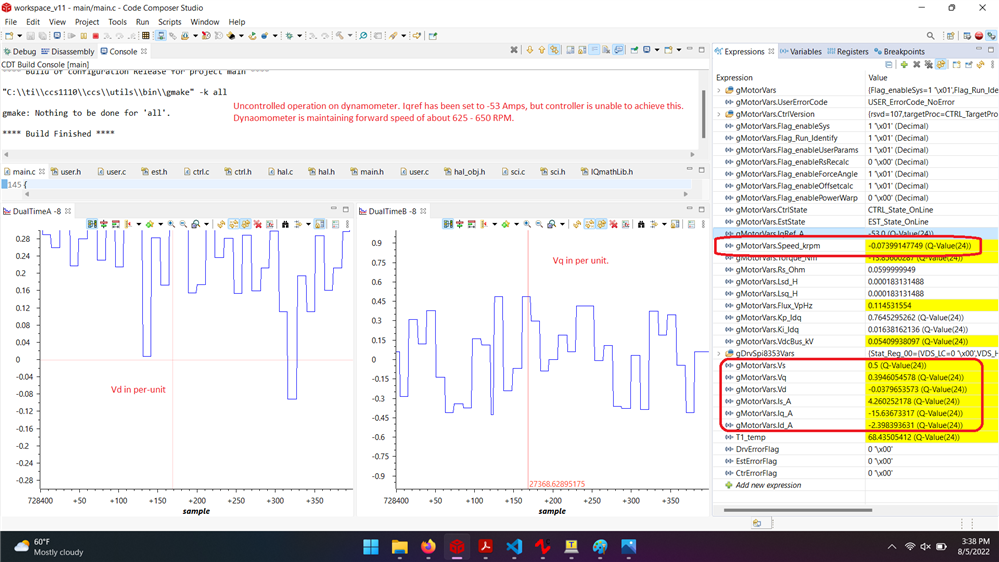
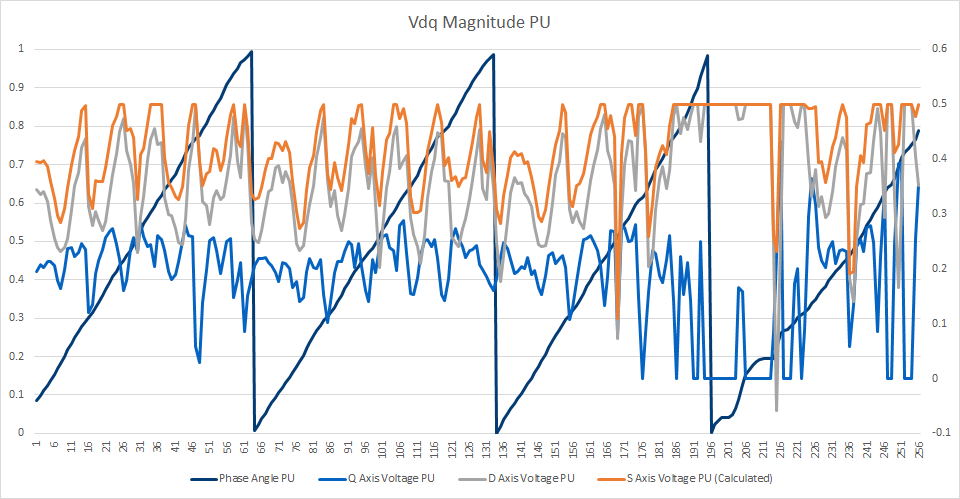
有人能解释为什么我们在重新稳压期间看到这种奇怪的行为和控制损失、以及我们如何调整控制器以消除它吗?
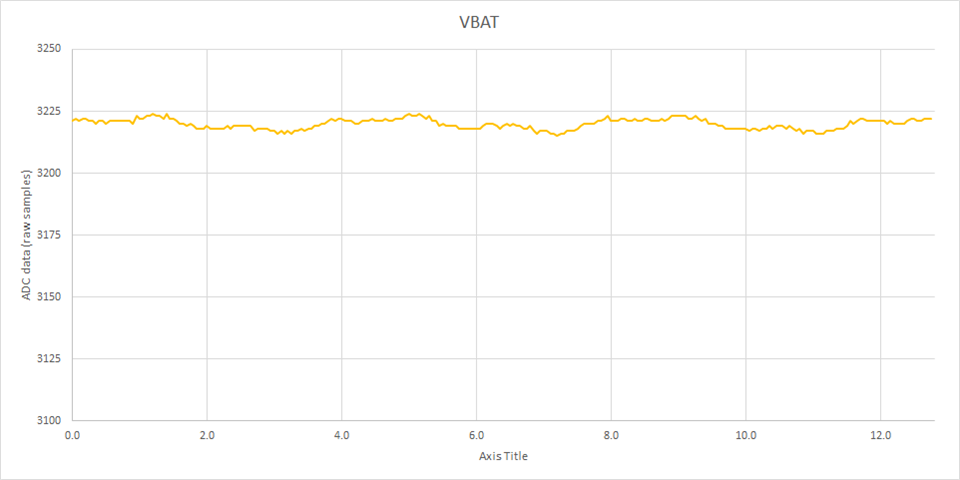
我看到我的定制设计有问题、当我将 Iqref 设置得越来越高时、在某个时候、传递到负载的扭矩会随着 Iqref 的增加而减小。 这是在测力计上具有固定速度负载的情况。 如果我继续增大 Iqref、控制器会变得混乱、并产生不稳定的扭矩。 我们在550 RPM 和850 RPM 时都看到了这种行为。 VBAT 大约为55V、55V 时的电机额定转速大约为2600RPM。该电机是一种10极对外转式电机。 我们使用的是一个大型测试电池、它可以接受非常大的 regen 电流、而不会出现任何问题。
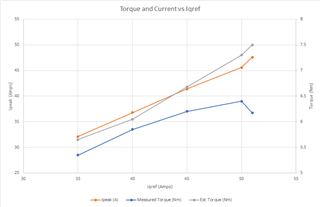
下图显示了测得的扭矩、测得的相电流(峰值)和估算的扭矩(来自快速输出)与 Iqref 的关系。 在图中、我显示 Iqref 为正、但当然、由于它是 regen、因此我们设置的 Iqref 实际上为负。
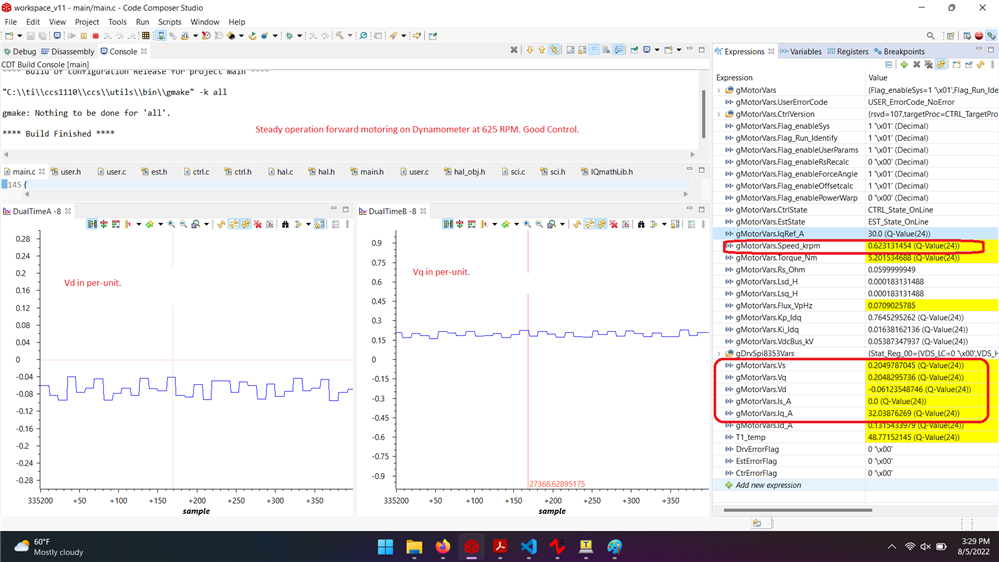
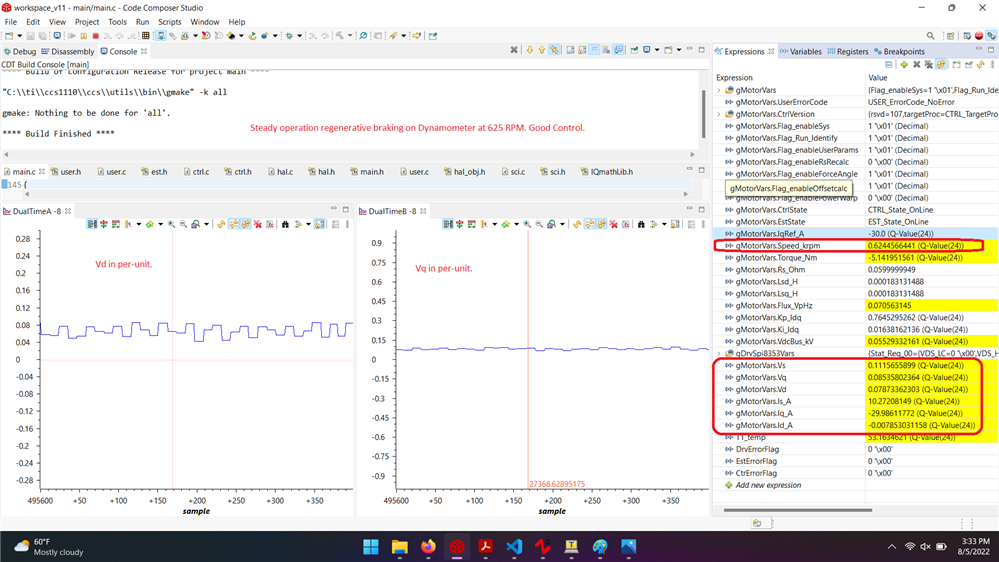
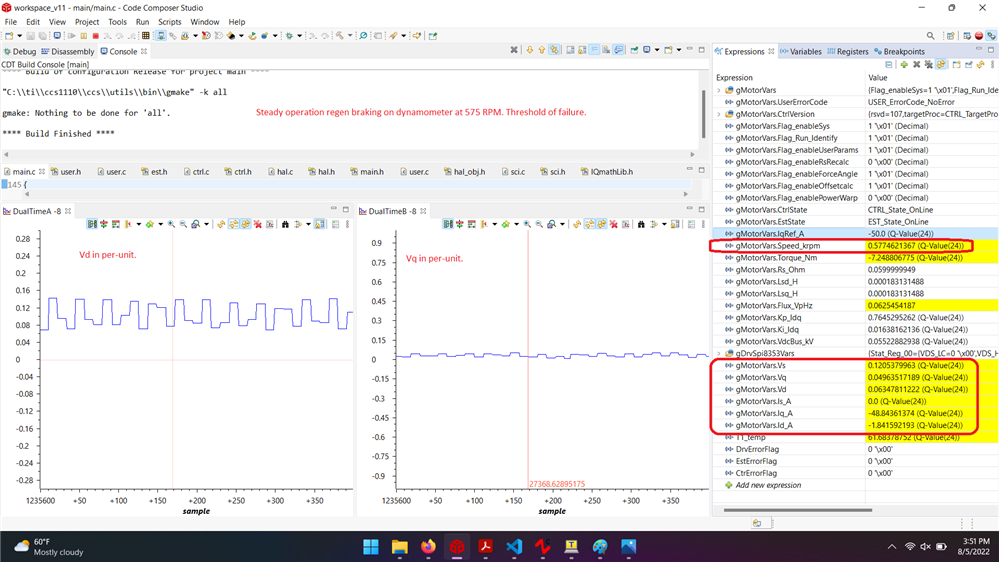
我们运行的代码本质上是实验5a。 我们使用调试器调整了 Iqref。
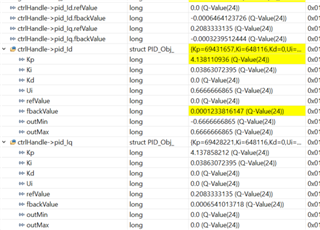
Rs 似乎会影响这个问题。 在一种情况下、我们强制 Rs 略高于 Id 的结果、这提高了失去控制的 Iqref 级别。
user.h 资料:
e2e.ti.com/.../2625.user.h
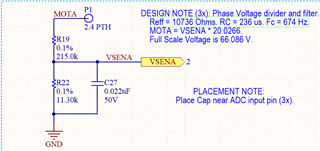
我们有一个 DRV 8353RS 栅极驱动器。 低侧分流器的电阻为500 uOhm。 分流放大器增益为40V/V VREF 为3.3V。硬件相位滤波器的截止频率约为1400Hz。
注意:过去、我们使用其他控制器对此电机进行了测试、并能够实现高于此值的扭矩水平。 我认为定子饱和不会发生。
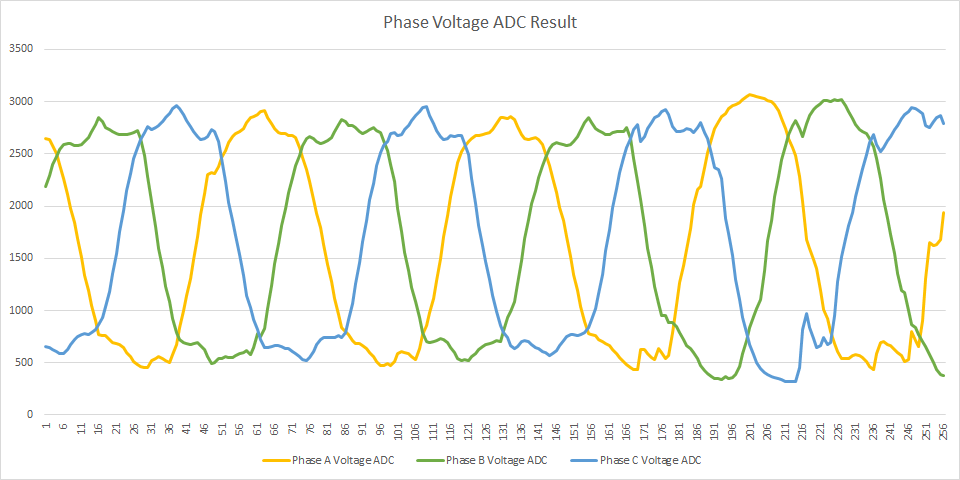
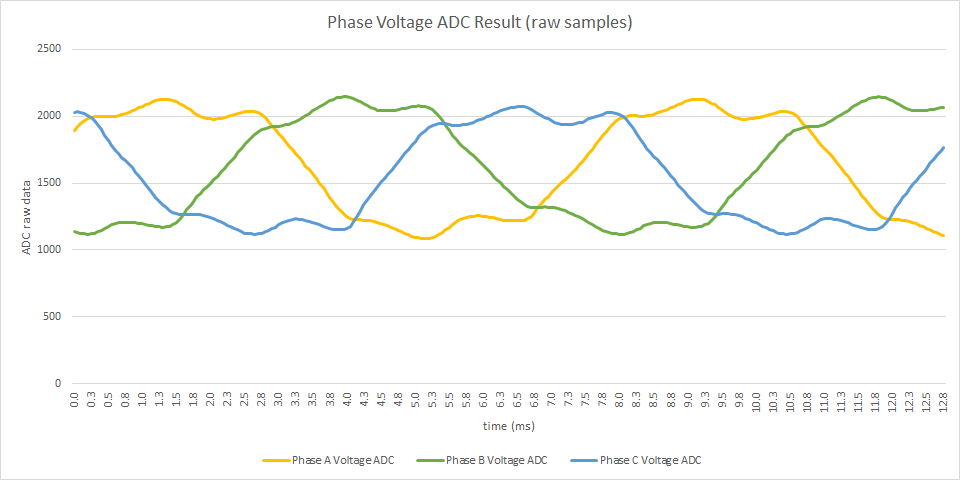
电机自由旋转时的反电动势(未连接控制器) 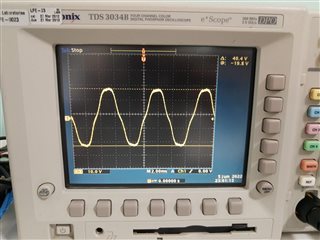
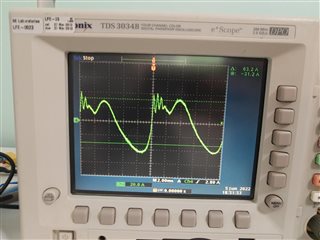
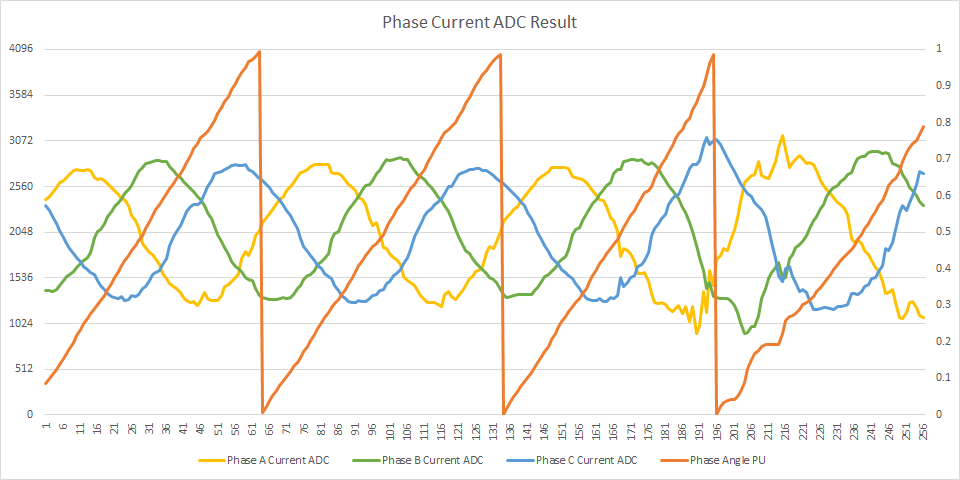
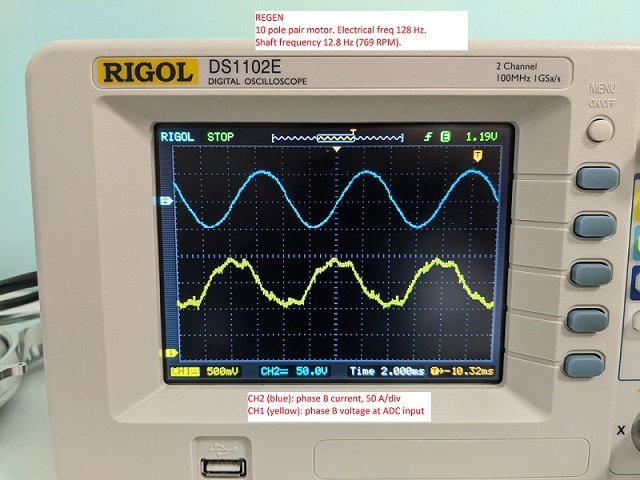
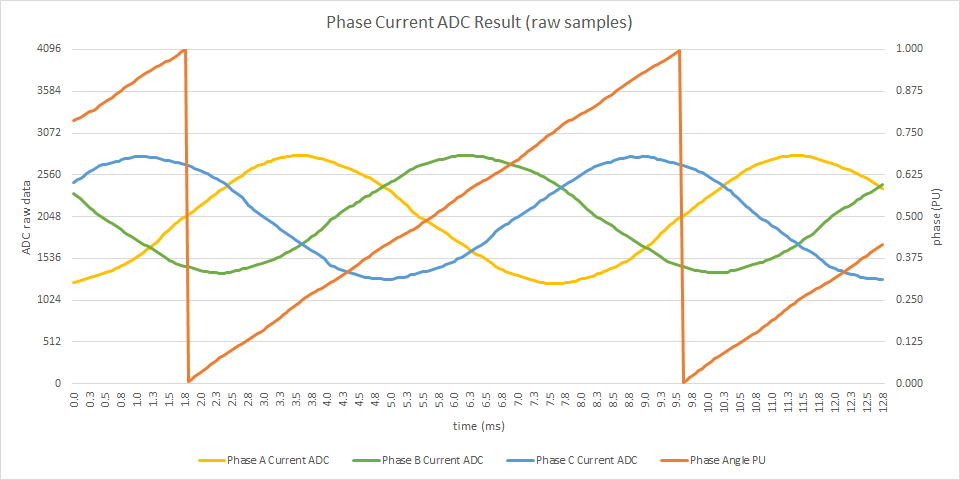
失去控制后的电流波形(不确定这是否为典型值... 似乎每次波形看起来都稍有不同)