请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDM-02007 大家好、
我目前正在使用 TIDM-02007进行测试。 我测试的代码是 LEVEL4。
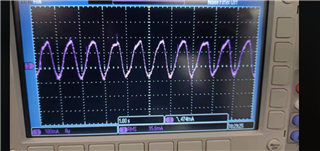
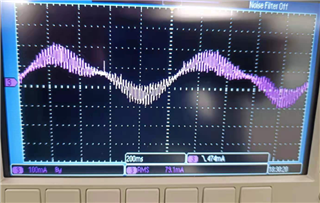
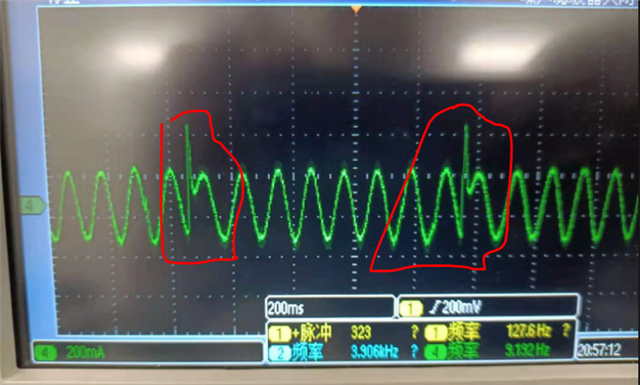
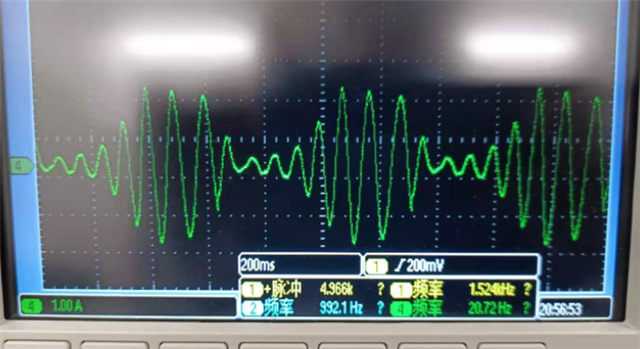
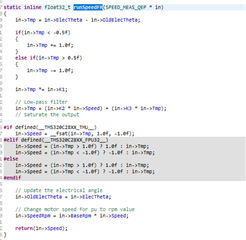
在启动过程中、电机将发生抖动。这似乎是在从"ENC_alignment"到"ENC_WAIT_for_index"的过程中引起的。
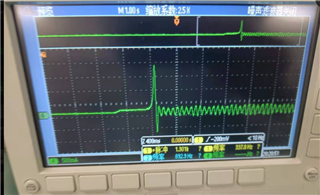
如图所示、当电流突然变化时、电机将振动。
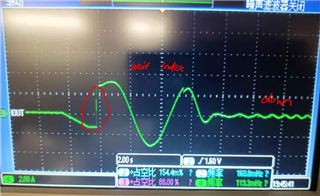
我是否可以问导致这种情况的原因? 我们是否应该改善这种情况?这是不设置参数的影响吗?
谢谢
简森