请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280049C 主题中讨论的其他器件:controlSUITE、 BOOSTXL-DRV8320RS、 DRV8320、 UCC27714、 MOTORWARE、 INA240
直流逆变器通过短跳线连接到 launchXL Booster Pack 接头 J5-J8。 ADC 电压反馈 A、B、C 相由3 x 6"双绞线组成、接地对共用两个电路板。
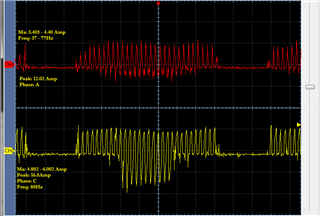
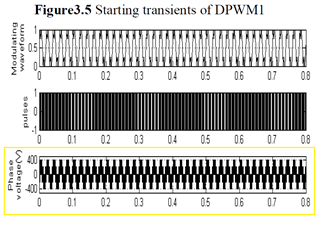
SDK v2.01 Lab05和 Lab07是否具有控制>1Kg 转子速度轨迹过冲的约束条件? 无论加速度调整为小于10Hz/秒,设置目标>10Hz 的电机在启动时都会停转 然后、轨迹只能增加10Hz 增量<60Hz 或轨迹引擎过冲目标并导致 CMPx 跳闸>18.5A。 典型的20Hz 轨迹目标速度下拉+24V 总线并使电机停转、使转子位于一极至多极点位置。 小于0.05千克转子质量的小型 Nidec 系列25电动机没有轨迹速度问题,通过24VDC 电源快速达到>200Hz。
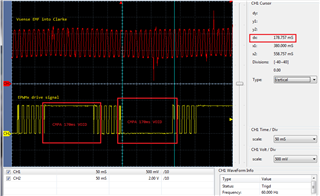
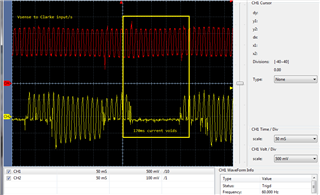
尝试确定齿接原因的大部分问题时间链接到 J7引脚64、65 (电压反馈)被反转、可能在 J7接头 LaunchXL 上?
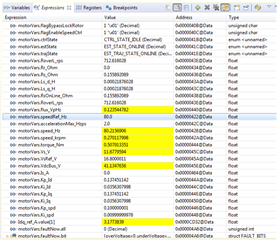
奇怪的是>2kg 转子质量最高300 RPM +24V 直流(通过 PI 速度控制实现的梯形 FOC)、只有168 RPM (通过 FAST)、拒绝>60Hz (除非40Vdc 电源)、反馈电阻分压器的最大值为57.42vdc。
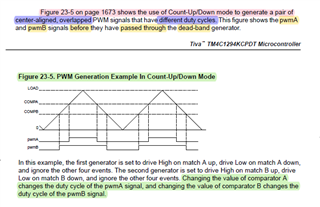
是否应仅为实际直流电源峰值(user.h)设置 USER_ADC_Nominal 总线电压? 电压反馈分压器是否 仅用于 USER_ADC_FULL_SCALE_VOLTGE_V? SIMPY Put 标称总线电压是否为独立参数? 显然、参数有助于确定扇区中点、但它是否直接属于 ADC 满量程电压的一部分或与之相关(5.2.3 SPRUHJ1H–2013年1月–2019年6月修订版)?
总之、标称直流总线电压能否比反馈电阻分压器低50%、而不影响轨迹引擎或速度控制器的操作?