Other Parts Discussed in Thread: TMS320F280049C, TMDSHVMTRINSPIN, C2000WARE, BOOSTXL-DRV8320RS, OPA2350, AMC1300
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSHVMTRINSPIN 主题中讨论的其他器件:TMS320F280049C、 C2000WARE、 BOOSTXL-DRV8320RS、 OPA2350、 AMC1300
大家好、团队、
我们使用 TMDSHVMTRINSPIN + TMS320F280049C、之前我们可以通过刷写‘C:\ti\c2000\C2000Ware_MotorControl_SDK_3_00_01_00\solutions\tmdshvmtrsocusfocin\f28004x\ccs\sensorless_".07中显示的代码来控制电机而不加载。
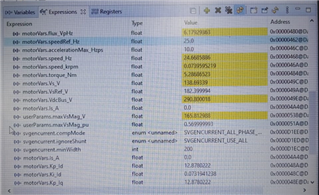
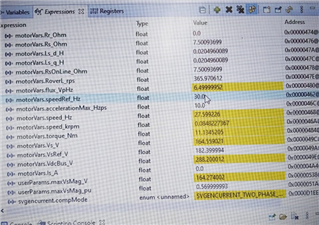
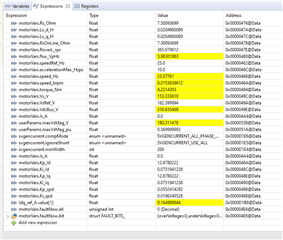
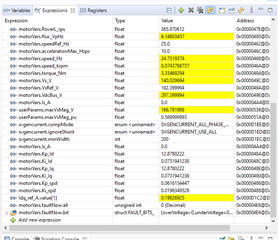
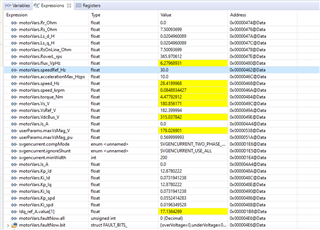
现在、我们将使用负载测试我的电机、下面是我的电机参数
RS:6.5 Ω
LD: 0.010496
LQ:0.010496
极痛:20.
额定扭矩:230 N-m
输出功率:1.4KW
TMDSHVMTRINSPIN 是否支持以满载测试电机?
我的应用是 HVLS 风扇
供参考:我们使用 lab05来识别电机参数、在没有负载条件的情况下不会有任何问题。 我们得到正确 的参数。
谢谢你