请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28388D 您好!
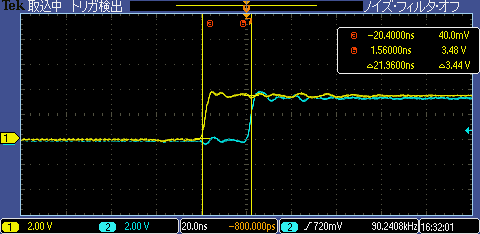
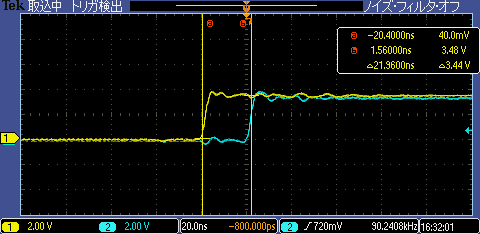
技术参考手册中提到“当启用高分辨率周期模式时,
EPWMxSYNC 脉冲将向 PWM 引入+/- 1 - 2周期抖动。 因此、
EPWMxSYNCO 源不应设置为 CTR = 0或 CTR = CMPB。 否则,抖动将随同步脉冲在每个 PWM 周期发生。”
根据这一解释,您能回答以下问题吗?
1) 1)是否有方法可以避免抖动? 如果需要将 EPWMxSYNCO 源设置为 CTR = 0以在实验中的每个 PWM 周期更新参数、
2) 2)如果高分辨率周期模式被禁用、当 EPWMxSYNCO 设置为 CTR = 0时、抖动是否会发生。
谢谢你。
此致、
文京